Поиск пелагических и придонных скоплений с помощью рыболокаторов горизонтального действия
Поиск рыбы в толще воды обычно ведется в режиме автоматического сканирования характеристики направленности (антенны). Антенну устанавливают под курсовым углом 80-90° правого или левого борта, затем она автоматически плавно или дискретно (шагами) разворачивается (не более чем на половину ширины характеристики за период между последовательными зондированиями, чтобы не оставалось непросматриваемых участков).
В случае наличия в заданном районе при поиске рыбы множества приходящих эхо-сигналов, что особенно часто бывает при поиске на небольших глубинах и при недостаточно ровном грунте, а также в узкостях, более целесообразен просмотр среды с использованием ручного управления разворотом антенны.
В прибрежных водах с глубиной, увеличивающейся в сторону открытого моря, целесообразно вести поиск рыбы при направлении антенны в сторону больших глубин. В противном случае сильно сокращается зона обзора и может иметь место значительная маскировка эхо-сигналов от рыбы эхо-сигналами от дна [52].
При благоприятных гидрологических условиях обнаружение рыболокатором пелагических скоплений рыбы обычно не вызывает больших затруднений, и после небольшой тренировки оператор легко начинает выделять, идентифицировать и оценивать сигналы, отраженные от косяков, особенно при сравнительно небольших расстояниях до них.
При поиске рыболокатор должен иметь максимально возможную чувствительность (коэффициент усиления), насколько это позволяет уровень шумов и помех в данный момент времени. Это подтверждается практикой применения рыболокаторов на промысле. Однако при очень благоприятных гидрологических условиях распространения звука высокая чувствительность может приводить к фиксации множества мешающих эхо-сигналов (от скоплений, не имеющих промыслового значения). Но в связи с тем, что условия распространения акустических колебаний часто подвержены значительным изменениям, работа при большом усилении приемного тракта обычно более оправдана (при малой чувствительности станции и изменении гидрологических характеристик среды могут не обнаруживаться вполне промысловые скопления).
При получении контакта чувствительность всегда может быть уменьшена для более четкого выделения трассы эхо-сигналов от косяка на ленте самописца или эхо-сигналов на других индикаторах аппаратуры.
Когда среди многих эхо-сигналов оператор замечает появление регулярных отметок от косяка рыбы, он уменьшает чувствительность, трасса эхо-сигналов от скопления становится более отчетливой и судно идет на сближение с целью. Если при сближении с косяком оказывается, что он по каким-то признакам не подходит для облова, судно продолжает поиск нового скопления и чувствительность станции снова увеличивают.
Более быстрому приобретению навыков оператором в оценке и классификации получаемых показаний способствует одновременный анализ данных различных индикаторов рыболокатора, а также параллельных эхограмм, полученных с помощью рыболокатора вертикального действия (рис. 18).
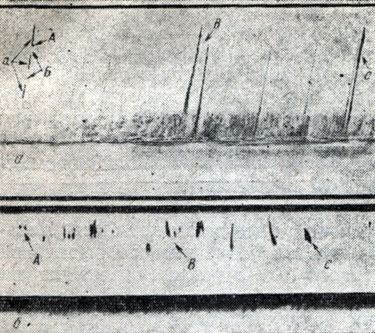
Рис. 18. Синхронные эхограммы рыболокаторов горизонтального (а) и вертикального (б) действия при локации косяков рыбы
На рис. 18, а показана реальная эхограмма регистрации косяков рыбы, находящихся в толще воды при нулевом курсовом угле характеристики направленности антенны, с соответствующими записями косяков в случае вертикальной локации с движущегося судна. Перерывы в регистрации трассы эхо-сигналов от косяка А связаны с периодическим разворотом акустической антенны рыболокатора (FH-203) на правый или левый борт на ±15°. Так, в моменты времени, соответствующие положению а, косяк находился в зоне действия станции, а в соответствующие положению Б характеристика была направлена в сторону от косяка (диапазон записи 0-320 м, угол наклона антенны 15°). На рис. 18, б приведена запись тех же косяков А, В и С при вертикальном лоцировании (диапазон регистрации 0-160 м, рабочая частота 14 кГц).
В связи с многообразием форм распределения и поведения промысловых объектов в зависимости от их вида, времени суток и года, биологического состояния и других факторов, а также значительными различиями в характеристиках дна в разных районах лова эффективность обнаружения придонных и донных скоплений и косяков в большей степени зависит от опыта оператора, его умения распознавать эхо-сигналы от придонной рыбы и грунта.
Ограниченность использования рыболокаторов горизонтального действия на многих промысловых судах при траловом лове придонных и донных скоплений в основном обусловлена сложностью выделения полезных эхо-сигналов от рыб из большого числа отражений от скал, кораллов, пиков, неровностей дна и др. Эффективность обнаружения придонной рыбы обычными рыболокаторами с широкими характеристиками направленности, конечно, сильно ограничена и в значительной степени зависит от характера и степени неровностей дна, вида объектов и т. д. Если промысловые объекты образуют достаточно плотные скопления у дна, например ставрида, скумбрия, сардинелла, сардина в Центральной Атлантике держатся в виде косяков большой протяженности по высоте, и дно достаточно ровное, то их обнаружение существенно облегчается. При работе в районе с достаточно ровным дном, особенно при малых наклонах характеристики направленности и прямолинейном (или близком к прямолинейному) характере распространения звука эхо-сигналы от косяков рыбы, находящихся в толще воды, могут поступать значительно позже эхо-сигналов от грунта и превышать по интенсивности донную реверберацию (рис. 19, а, б). Эхозапись в этом случае подобна изображенной на рис. 19, б. Возможности различения эхо-сигналов от скоплений рыбы в толще воды и у дна тогда улучшаются, и при правильной установке регуляторов усиления и соответствующей регулировке ВАРУ может быть получена большая дальность обнаружения скоплений.
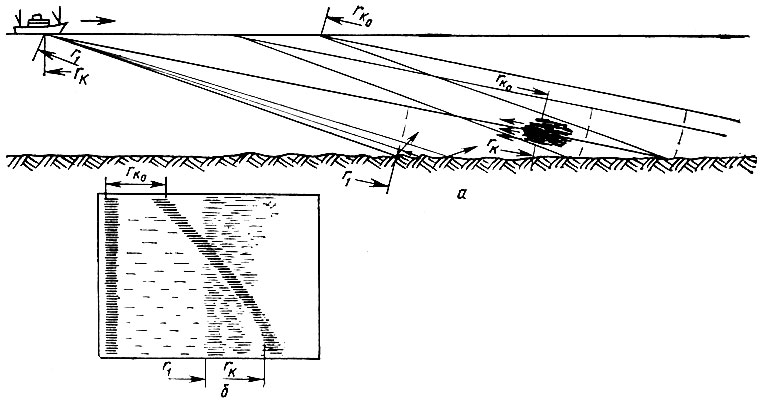
Рис. 19. Процесс обнаружения косяка рыбы на фоне донной реверберации (а) и характер получаемой при этом эхограммы (б)
В случае неровного дна возможности выделения эхо-сигналов от рыбы снижаются и сокращаются дальности обнаружения скоплений. На рис. 20, а представлены эхограммы регистрации скоплений рыбы в указанных условиях с синхронной эхограммой рыболокатора вертикального действия (см. рис. 20, б). В левой части эхограммы, показанной на рис. 20, а, можно видеть различный характер записи эхо-сигналов от выступов дна при почти перпендикулярном падении акустической энергии (на переднюю часть выступов) и скользящем озвучивании (вдоль обратной стороны выступа) по ходу движения судна. В последнем случае интенсивность отраженных сигналов сильно уменьшается и они регистрируются в виде значительно менее четких отметок (рыболокатор FH-203, угол наклона 15°, диапазон 0-160 м). Перерыв в записи трассы небольшого косяка В объясняется поворотом характеристики направленности антенны на правый борт (от 0 до 45°) после того, как косяк был обнаружен при курсовом угле 0°. После возвращения антенны в исходное положение эхо-сигналы от косяка вновь стали фиксироваться на ленте самописца.
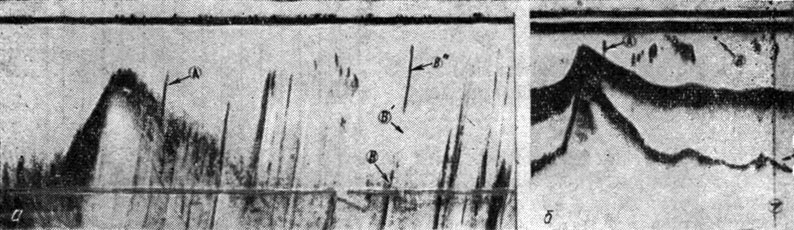
Рис. 20. Синхронные эхограммы рыболокаторов горизонтального (а) и вертикального (б) действия при локации косяков рыбы в случае неровного дна
На рис. 21 представлены синхронные эхограммы, полученные при локации выступа на дне А и придонного скопления рыб В рыболокатором горизонтального FH-203 (см. рис. 21, а) и вертикального действия (см. рис. 21, б). Они были обнаружены на расстоянии более 640 м. По мере изменения наклона дна увеличивается количество акустической энергии, принимаемой антенной от дна, о чем свидетельствует повышение интенсивности эхо-сигналов от грунта.
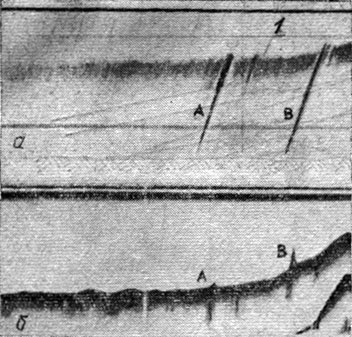
Рис. 21. Синхронные эхограммы рыболокатора горизонтального действия FH-203 а (диапазон 0-640 м, угол наклона антенны 15°) и вертикального действия (б) при локации выступа на дне А и донного скопления В (1 - грунт)
Зона поиска придонных скоплений рыбы при использовании рыболокатора горизонтального действия шире, чем в случае применения рыболокатора вертикального действия даже при большой ширине характеристики направленности его антенны.
На рис. 22 показаны поиск и регистрация придонного скопления рыбы рыболокатором при плоском и ровном дне, угле наклона антенны 30°, диапазоне регистрации 0-320 м и скорости судна 8 уз (рабочая частота станции 28 кГц, глубина места не более 200 м).
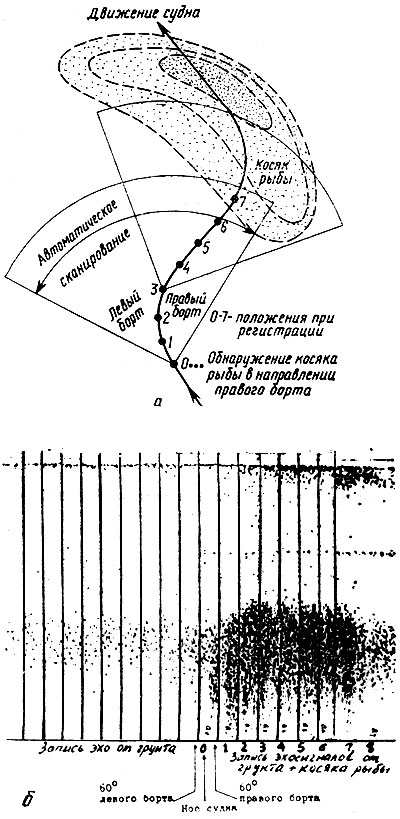
Рис. 22. Регистрация придонного скопления рыболокатором Koden при наклонном зондировании: а - траектория движения судна при поиске; б - эхограмма
Поперечные линии на эхограмме (см. рис. 22, б) показывают период одного сканирования антенны от 60° правого борта до 60° левого, расстояние между ними равно 30 с. В период времени, отмеченный на рис. 22, а и б цифрой 0, справа было обнаружено скопление рыбы. Судно повернуло направо, проводя непрерывную регистрацию рыбы при автоматическом сканировании (периоды времени 1-7 на рис. 22, а и б). В этом случае эхо-сигналы от рыб отображаются в виде более темных отметок, чем эхо-сигналы от морского дна, так как при наклонном падении акустической энергии на сравнительно ровный грунт без рыбы значительная часть звука испытывает зеркальное отражение (не возвращается к антенне), а при наличии рыбы к антенне возвращается большее количество отраженной энергии вследствие диффузного рассеяния (рис. 23, а).
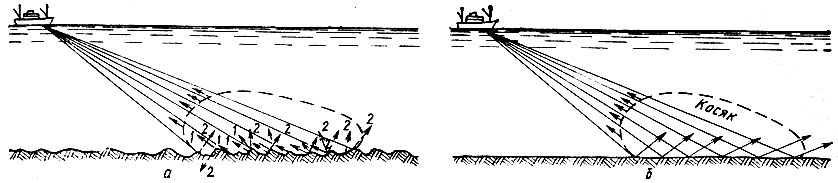
Рис. 23. Отражение акустической энергии от неровного (а) и идеально плоского (б) дна
При наличии идеально плоского дна вся падающая на него акустическая энергия должна отражаться от него в сторону от приемной антенны рыболокатора, и при наличии скопления рыбы у дна должны приниматься эхо-сигналы только от этого скопления (рис. 23, б). Так как практически идеально плоского дна не существует, то обычно на ленте фиксируется определенная часть эхо-сигналов от грунта.
Большую помощь при оценке показаний в случае поиска пелагических и придонных скоплений рыболокаторами горизонтального действия могут оказывать слуховые индикаторы. При приеме эхо-сигналов на слух обеспечивается большая дальность обнаружения объектов, не требуется постоянное наблюдение за показаниями других индикаторов при автоматическом поиске и, следовательно, нахождение оператора у аппаратуры, облегчаются количественная оценка обнаруженного скопления и определение его параметров.
При использовании слуховых индикаторов отраженные сигналы имеют следующие основные характеристики [33]:
рыба отсутствует - прослушиваются посылка импульса и реверберация. Вначале слышен сильный звук, который постепенно затихает. Более быстрое спадение силы звука наблюдается при отрицательной рефракции, например летом;
небольшая стайка рыбы в толще воды - эхо, звучащее с переливами и отчетливо прослушиваемое на фоне реверберации;
отлогий песчаный берег - раскатистое эхо, возможны несколько "пиков" громкости;
скалы - четкое многократное эхо со звоном, прослушиваемое на фоне реверберации;
надводные и подводные суда - короткое по длительности эхо со звонким, почти металлическим звучанием;
кильватерная струя - эхо напоминает эхо от косяка рыбы; если импульс посылки падает на нее по нормали. Когда импульс посылки направлен под углом к ней, эхо затухает медленнее (но прослушивается при развороте антенны на большой угол, т. е. в очень широком секторе, что помогает в распознавании кильватерной струи);
звуковые сигналы, издаваемые морскими животными, например китообразными в полосе пропускания рыболокатора, прослушиваются как четкие потрескивания, свисты, щелканья и др.;
эхо-сигналы от скоплений разных видов промысловых рыб обычно имеют определенные характерные отличия (как при прослушивании их в слуховом индикаторе, так и при записи на ленте регистратора). Так, от сардины, сельди, мойвы принимаются более четкие отраженные сигналы; от скумбрии - шипящие, прерывистые; от ставриды - "мягкие", шипящие (запись более серая) и т. д.
Использование слухового индикатора при поиске придонных скоплений может давать еще больший эффект, чем при обнаружении косяков рыбы в толще воды [35]. Эхо-сигнал от косяка рыбы, находящегося в толще воды, имеет чистый тон и достаточно резкие границы. Эхо-сигналы от придонных косяков рыб звучат приглушенно и имеют менее четкие границы, подъем грунта воспринимается с приглушенным рокотом.
Для эффективного использования слухового индикатора оператору требуется большой опыт, чтобы по характеру звучания эхо-сигналов определять наличие рыбы у дна. Как правило, в этом случае оператор сравнивает каждый поступающий эхо-сигнал с рядом предыдущих, чтобы выделить из них тот, при котором донная реверберация прослушивается отчетливее и дольше (такое выделение полезных эхо-сигналов возможно лишь при достаточно ровном дне и в тихую погоду, особенно если в станции отсутствует стабилизация акустической антенны или ее характеристики направленности).
Необходимые навыки использования рыболокатора при поиске придонных и донных скоплений рыбы могут быть приобретены оператором и в процессе самостоятельной работы с аппаратурой в районе промысла (на переходах, в процессе тралений, выхода судна в точку отдачи трала и т. д.). При этом целесообразна такая последовательность в самостоятельном обучении [26]:
приобретение навыков в различении и классификации эхо-сигналов;
определение границ обнаруженного скопления;
проведение автоматического поиска и выход на обнаруженное скопление по данным рыболокатора горизонтального действия;
непосредственное проведение прицельных тралений с помощью рыболокатора.
Начинать обучение лучше всего в районах с глубинами до 100-150 м, достаточно ровным дном и при наличии придонных косяков рыбы. После включения рыболокатора необходимо установить акустическую антенну в горизонтальной плоскости на курсовой угол 0°, а наклон ее отрегулировать таким образом, чтобы продолжительность реверберационного сигнала от дна была максимальной. Обычно ее устанавливают под углом 2-7° при диапазонах от 0 до 1000-1200 м и выбирают максимальную длительность излучаемого импульса. Коэффициент усиления должен быть таким, чтобы реверберация регистрировалась на ленте самописца серым фоном. Для равномерной записи отметок реверберационных эхо-сигналов на всей ширине бумаги проводят соответствующую регулировку длительности и амплитуды ВАРУ. Одновременно регулируют уровень и тон принимаемых эхо-сигналов на слуховом индикаторе. Необходимо также включить рыболокатор вертикального действия.
После этого можно приступить к оценке, анализу и классификации принимаемых отраженных сигналов. При отсутствии полезного эхо-сигнала от рыбы в индикаторе прослушивается эхо реверберации, несколько напоминающее звуки, возникающие при раскатывании гороха по железу. Необходимо научиться хорошо различать эти звуки, чтобы уверенно выделять на фоне реверберации эхо-сигналы от промысловых объектов. Эхо-сигнал от рыбного скопления выделяется громкостью и звонкостью, кроме того, он имеет ограниченную продолжительность по времени и, следовательно, по дистанции. По мере движения судна эхо-сигнал от скопления прослушивается на все более близких дистанциях. Через некоторое время после прекращения записи трассы эхо-сигналов от скопления на ленте самописца рыболокатора горизонтального действия косяк рыбы оказывается под судном, регистрируется на ленте самописца аппаратуры вертикального действия и ее электронном индикаторе. Следует запоминать звучание эхо-сигнала от косяка и сопоставлять полученные данные с показаниями на самописце и электронном индикаторе рыболокатора вертикального действия.
В процессе работы прослушиваются и регистрируются также эхо-сигналы от скал, возвышенностей на дне, кораллов и др. Постоянное сопоставление звучаний эхо-сигналов от различных объектов и предметов и записей их на регистраторах и индикаторах при вертикальном лоцировании способствует постепенному приобретению необходимых навыков и опыта их различения и классификации только на основании данных рыболокатора при наклонном зондировании.
Затем можно начинать тренировку в определении границы обнаруженного скопления с использованием слухового индикатора. Для этого при приеме эхо-сигнала от косяка антенну поворачивают на 15-20° влево от диаметральной плоскости судна с помощью регулятора разворота и в течение нескольких посылок прослушивают приходящие эхо-сигналы. Если эхо-сигнал от скопления еще слышен, антенну поворачивают влево на больший угол, если же не прослушивается, то перед каждой посылкой зондирующего импульса антенну поворачивают примерно на 5° к носу судна. Если при одном из положений антенны принят эхо-сигнал от рыбы, отмечают курсовой угол. Затем антенну переводят на 15-20° на правый борт и повторяют те же операции, что и в случае определения левой границы косяка. Если левая кромка скопления находится, к примеру, под углом 15° левого борта, а правая - под углом 5°, то средина косяка будет находиться под углом 10° левого борта. При определении кромок косяка необходимо по возможности уменьшать коэффициент усиления приемного тракта для повышения точности отсчетов.
После этого переходят к следующему этапу - автоматическому поиску и выходу на скопление по данным рыболокатора, для чего включают режим автоматического разворота антенны, устанавливают сектор обзора в пределах от 60 до 70° правого и левого борта и при движении судна прослушивают принимаемые эхо-сигналы. При приеме эхо-сигнала от рыбы переходят на режим ручного разворота антенны, определяют границы скопления и поворачивают судно на центр косяка. При подходе судна к косяку постоянно определяют его кромки и положение центра косяка. С приобретением достаточных навыков по выводу судна на придонные и донные скопления рыб с помощью рыболокатора можно переходить к проведению прицельных тралений (см. главу II).
В случае волнения моря поиск рыбы с помощью рыболокаторов горизонтального действия существенно усложняется из-за увеличения уровня помех и степени затухания акустической энергии в более насыщенном воздушными пузырьками поверхностном слое воды, а также из-за трудности получения и удержания эхоконтактов с рыбой. Особенно большие затруднения возникают при использовании аппаратуры на малых судах, имеющих большие углы и меньшие периоды бортовой и килевой качки. В связи с тем, что указанные суда, как правило, работают на сравнительно небольших глубинах, при волнении моря резко увеличиваются количество и уровень мешающих сигналов, отраженных от поверхности моря и грунта. При неровном дне уровень таких помех может быть настолько значительным, что делает невозможным эффективный поиск рыбы. Радикальным решением этой проблемы является стабилизация антенн или характеристик направленности рыболокаторов горизонтального действия.
При поиске скоплений донных и пелагических рыб, особенно на малых судах и в районах с небольшими глубинами, более эффективно использование рыболокаторов, имеющих узкие характеристики направленности с подавленными боковыми лепестками, и системы стабилизации акустической антенны, так как узкие характеристики можно использовать без стабилизации только тогда, когда волнения моря нет или оно мало. Такими рыболокаторами являются, например, станции типа SS150, SS220B и SS110 и др. фирмы "Весмар" (США), имеющие ширину характеристики направленности от 6,5 до 9° (в зависимости от типа станции) с уменьшенными боковыми лепестками, при этом антенна стабилизирована от влияния бортовой и килевой качки судна (до 25°) [88].
В качестве основного устройства воспроизведения в рыболокаторах типа SS используется электронный индикатор с секторной разверткой, оказывающий большую помощь не только при поиске рыбы у дна, но и при обнаружении скал, опасных грунтов и участков. Его применение позволяет проводить траления вблизи препятствий на дне и в других неудобных для лова местах (вблизи рифов и гряд камней, в проливах и подводных каньонах), где суда, не оборудованные рыболокаторами горизонтального действия, могут повредить орудия лова.
В станциях типа SS115, SS220, SS230 имеется дополнительный блок памяти, с помощью которого принятые эхо-сигналы запоминаются и затем повторно воспроизводятся на ЭЛТ. Тем самым облегчается оценка показаний индикатора. Предусмотрена также возможность непосредственного отсчета на цифровом табло данных о наклонной дальности до цели, дистанции до нее по горизонту и глубины нахождения обнаруженного объекта. Оператор выводит яркую точку (маркер) в место индикации обнаруженного объекта на экране и в зависимости от установленного положения соответствующего переключателя снимает необходимые отсчеты.
В низкочастотном (60 кГц) рыболокаторе SS230 кроме режима индикации с яркостными отметками эхо-сигналов имеется режим воспроизведения данных с амплитудными отметками целей, что облегчает их идентификацию и количественную оценку, в том числе оценку плотности (рис. 24. а). В качестве дополнительного устройства воспроизведения используется самопишущий регистратор размерами 40,64×33,2×13,97 см (масса 9 кг) с записью на электротермическую или электрохимическую бумагу шириной 150 или 220 мм (с устройствами белая, серая, контурная линии и привязки к дну). Отличительной особенностью новых регистраторов фирмы "Весмар" является использование блока электронной памяти, благодаря чему в самописцах отсутствуют обычные устройства регулировки скорости перемещения пишущего электрода, изменения диапазонов и т. д. Благодаря применению блока памяти возможно усреднение нескольких эхо-сигналов до подачи их на перо. Тем самым повышается помехоустойчивость аппаратуры. Благодаря длительному послесвечению экрана ЭЛТ оператор может наблюдать сразу всю совокупность эхо-сигналов от косяка рыбы, дна и т. д. (рис. 24, б). В результате облегчаются оценка скопления и определение его параметров. На рис. 24, б небольшой косяк рыбы, находящийся на глубине 30 м (при глубине места 60 м), виден примерно посредине между центром индикатора и трассой отметок эхо-сигналов от дна (антенна станции была наклонена на угол 30°).
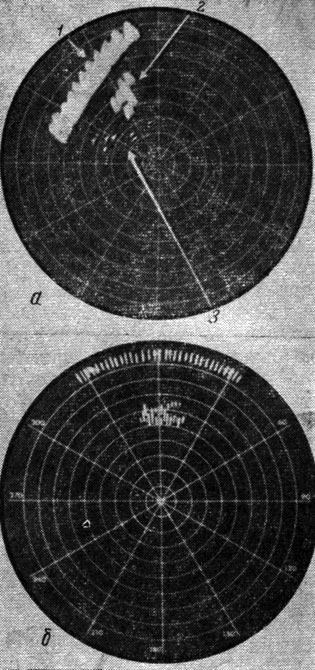
Рис. 24. Изображение на экране индикатора в режиме с амплитудными отметками эхо-сигнала - а (1 - край скалы; 2 - косяк рыбы; 3 - разреженные скопления) и яркостными отметками отраженных сигналов - б
В связи с тем, что в рыболокаторах типа SS в качестве основного устройства воспроизведения используются электронные индикаторы с секторной разверткой, методика применения аппаратуры при поиске придонных рыб на небольших глубинах была выработана применительно к ним, хотя может использоваться при работе с другими рыболокаторами, и заключается в следующем. Антенну рыболокатора устанавливают под углом 90°, т. е. излучающей поверхностью вниз. Выбирают диапазон просмотра, примерно равный удвоенной глубине места, устанавливают зону сканирования антенны (около 180°). Затем регулируют яркость развертки, чтобы ее трассы были едва заметными или почти не отмечались на экране. Устанавливают чувствительность приемного тракта рыболокатора до появления на экране четких отметок донных эхо-сигналов (длиной порядка 0,7-1,3 мм) примерно посредине между центром и краем ЭЛТ. Постепенно уменьшают угол наклона антенны, при этом отметки эхо-сигналов от грунта смещаются к краю экрана. Угол наклона антенны в вертикальной плоскости регулируют таким образом, чтобы эхо-сигналы от дна воспроизводились недалеко от края экрана. Чаще его выбирают в пределах 30-60°. Затем чувствительность станции регулируют таким образом, чтобы эхо-сигналы от достаточно ровного и мягкого грунта, например песчаного или илистого, воспроизводились очень слабо или совсем не отмечались на экране индикатора (т. е. были бы едва заметными).
Если указанный процесс регулировки выполнен, эхо-сигналы от твердого (скалистого или каменистого) грунта или от препятствий на дне и возвышенностей будут отчетливо видны на экране, и при приобретении определенного опыта оператор будет способен обнаруживать их с помощью электронного или слухового индикатора, или даже только на слух (без наблюдения за ними по экрану), различать характер грунтов (мягкие или жесткие грунты).
На рис. 25, а видно, что при большой чувствительности аппаратуры оператор наблюдает лишь эхо-сигналы от отдельных рыб и небольших косяков вблизи судна, а донные эхо-сигналы маскируют все остальные цели. После регулировки чувствительности аппаратуры (рис. 25, б) величина отметок от ближних целей уменьшилась, однако одновременно стал четко обнаруживаться более крупный косяк рыбы на значительных расстояниях от судна прямо по курсу судна и справа - скала на дне.
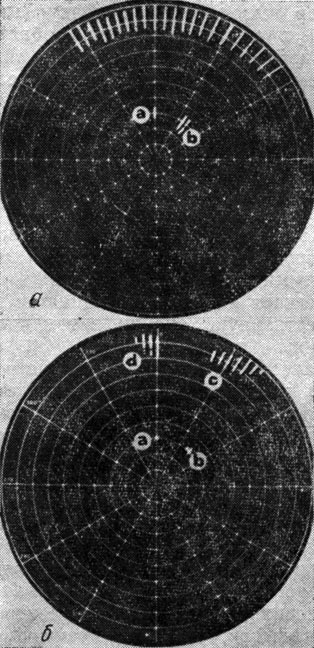
Рис. 25. Неправильная (а) и правильная (б) регулировка чувствительности рыболокатора
При поиске скоплений пелагических объектов рыболокаторами типа SS в мелководных районах, несмотря на установку угла наклона антенны аппаратуры, близкого к 0°, характеристика направленности на дистанции, равной примерно 4-6 глубинам места, начинает захватывать дно (рис. 26, а). При неровном и твердом грунте донные эхо-сигналы, как правило, практически полностью маскируют отраженные полезные эхо-сигналы на экране индикатора. Однако если дно достаточно ровное и мягкое, большая часть акустической энергии поглощается мягким грунтом или отражается в сторону от судна, и число донных эхо-сигналов на экране индикатора аппаратуры существенно сокращается.
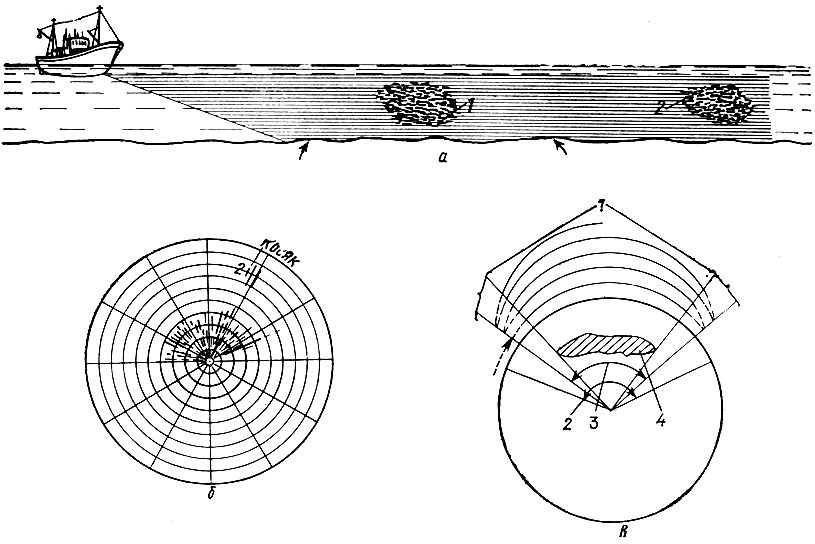
Рис 26. Работа рыболокатора на малых глубинах (а), получаемое при этом изображение эхо-сигналов (б) и действие системы автоматического сопровождения скопления (в): 1 - секторы отсутствия приема эхо-сигналов; 2 - первоначальный сектор обзора; 3 - сектор захвата цели; 4 - косяк
Благодаря стабилизации антенны в рыболокаторах типа SS условия приема отраженных сигналов более стабильны и при правильной регулировке и установке угла наклона антенны, чувствительности аппаратуры и ВАРУ может быть обеспечено достаточно качественное обнаружение пелагических скоплений рыбы в районе с малыми глубинами. При этом чаще пользуются следующей методикой работы с рыболокатором. Вначале угол наклона антенны также устанавливают равным 90°, включают диапазон обзора в пределах от 150 до 300 м или более в зависимости от глубины места в районе работы судна. После этого регулируют яркость и далее предварительно устанавливают чувствительность аппаратуры, как и в предыдущем случае, затем постепенно уменьшают угол наклона антенны в направлении к 0°. При достижении определенного угла наклона антенны смещение донных эхо-сигналов к краю экрана прекращается. Однако угол наклона продолжают уменьшать до тех пор, пока на экране не будет воспроизводиться минимальное количество отметок эхо-сигналов, отраженных от грунта. В очень мелководных районах обычно наиболее благоприятные условия обнаружения рыбы имеют место при угле наклона +4°, если нет большого количества поверхностных эхо-сигналов при волнении моря. В последнем случае проводится тщательная регулировка угла наклона от минус 4 до плюс 4° для получения минимального числа донных и поверхностных эхо-сигналов. Затем корректируется чувствительность приемного тракта.
Эффективность работы рыболокатора в мелководных районах существенно зависит от правильной регулировки чувствительности ВАРУ, поэтому оператор должен периодически тренироваться по известным подводным или видимым надводным целям (например, судам) для приобретения необходимых навыков в работе с аппаратурой и в регулировке и установке ее оперативных органов управления. На рис. 26, б видно, что отметки от более плотного косяка рыбы 2 четко различаются на экране индикатора на дистанции свыше 300 м, тогда как эхо-сигналы от менее плотного ближнего косяка 1 замаскированы донными эхо-сигналами с зоны, отмеченной стрелками на рис. 26, а, так как с нее принимается больше отметок эхо-сигналов от грунта. С помощью аппаратуры типа SS в Мексиканском заливе обеспечивалось обнаружение средних косяков менхедена на дистанции свыше 300 м при глубине места всего 3 м. Обнаружение рыбы на таких дистанциях в данных условиях требует высокой чувствительности аппаратуры, поэтому во избежание потери отметок сигналов от косяка в отметках донных эхо-сигналов при приближении судна к косяку на расстояние 90-120 м необходимо своевременно уменьшать чувствительность приемного тракта и оперативно регулировать ВАРУ [94-96].
Благодаря использованию рыболокаторов типа SS малые траулеры донного лова могут вести эффективный траловый лов вблизи рифов и гряд камней, в проливах и подводных каньонах, где суда, не оборудованные подобной аппаратурой (рыболокаторами типа SS) практически не могут работать из-за частых повреждений орудий лова.
В данном случае при поиске придонных скоплений применяется изложенная выше методика работы с аппаратурой. Разворот антенны проводится до 180°, чтобы можно было наблюдать скалы, гряды и узкости не только впереди судна, но и в стороне от него. Эхо-сигналы, поступающие от скал и скальных пород, прослушиваются с помощью слухового индикатора, по электронному индикатору станции отмечаются их местонахождение, очертания и протяженность. Эта информация учитывается при выборе курса судна во время облова скоплений.
Указанные рыболокаторы широко применяются не только при траловом и кошельковом лове, но и при лове жаберными сетями, троллами и другими орудиями лова на малых судах. При поиске промысловых объектов эффективно используется информация, не только воспроизводимая на ЭЛТ, но и прослушиваемая в слуховом индикаторе.
Рыболокатор со стабилизированной акустической антенной FH-105 (рабочая частота 150 кГц и дальность обнаружения рыбных скоплений до 300 м) также разработан известной японской фирмой "Фуруно" [17].
Введенные в указанные выше рыболокаторы устройства автоматического сопровождения обнаруженных скоплений облегчают работу операторов с этой аппаратурой.
После обнаружения косяка оператор устанавливает центр сектора автоматического разворота антенны таким образом, чтобы цель оказалась в пределах этого сектора (рис. 26, в) и включает устройство автоматического слежения. Если при автоматическом повороте антенны вправо (см. рис. 26, в) в течение примерно четырех циклов лоцирования будет отсутствовать прием отраженных сигналов (характеристика направленности не будет захватывать цель), направление разворота антенны переключается указанным устройством. Затем происходит автоматическое переключение поворота антенны при отсутствии приема эхо-сигналов слева от косяка и т. д. Если за время поворота антенны от одного края сектора захвата до другого косяк сместится за пределы первоначально установленного сектора обзора, устройство перестает работать и необходимо вновь установить центр сектора таким образом, чтобы он захватывал весь косяк. Для эффективной работы устройства сопровождения необходимо, чтобы эхо-сигнал от косяка по интенсивности превышал другие регулярные отраженные сигналы, например сигналы от дна.
Рыболокаторы горизонтального действия позволяют обнаруживать потерпевшие крушение и затонувшие суда, около которых часто находятся большие скопления рыбы. Как указывается в литературе [53], указанный метод широко используется датскими рыбаками при лове трески сетями в Северном море, где имеется много затонувших судов (свыше 1000). Они применяют станции "Симрад EL" для обнаружения места аварии и оценки наличия рыбы у затонувшего судна. При постановке сетей с помощью рыболокатора проверяют правильность их установки относительно течений, отстояние сетей от судна и одной сети от другой.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'