Возможности высокочастотной аппаратуры
Слои воздушных пузырьков, часто существующие в поверхностном слое, при волнении иногда препятствуют прохождению акустической энергии от антенны и обратно, особенно если рыболокатор работает на низких частотах. При работе аппаратуры на частотах выше 100 кГц обеспечивается нормальная локация даже через кильватерную струю.
При использовании высокочастотной аппаратуры однако ширина зоны действия рыболокатора будет небольшой благодаря наличию довольно узких характеристик направленности антенны. Это обусловливает сокращение полосы просмотра подводной обстановки и, следовательно, получение меньшего числа отметок эхо-сигналов от рыбы при одинаковом ее количестве в районе, а также снижает возможности регистрации прибором разреженных скоплений на ходу судна (при регистрации достаточно протяженных и плотных скоплений рыбы движение судна мало влияет на обнаружение). Из-за дискретного характера работы рыболокатора с увеличением скорости хода судна сокращается количество эхо-сигналов, принятых от отдельных объектов, т. е. зона его действия сужается. Хотя при движении судна становится уже зона обнаружения (по сравнению со статической) у рыболокаторов с любой характеристикой направленности, при узких характеристиках направленности данные изменения оказывают значительно более существенное влияние на поисковые качества аппаратуры. Одновременно уменьшается максимальная глубина обнаружения рыбы прибором и появляются мертвые зоны на малых дистанциях, так как на ленте самописца за время нахождения объекта в зоне действия аппаратуры от него не будет принято три минимально необходимых для надежного различения эхо-сигнала во всем диапазоне работы аппаратуры (рис. 59).
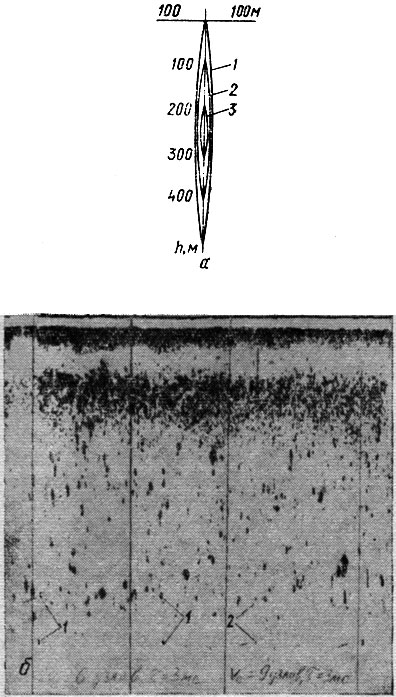
Рис. 59. Влияние скорости судна на обнаружение объектов рыболокатором: а - изменение зоны обнаружения (1, 2 и 3 - зоны обнаружения); б - обнаружение точечной цели ВЧ-трактом (1, 2 - цели, регистрируемые на скорости судна 6 и 9 уз соответственно)
На рис. 59, а [13] видно, что при скоростях свыше 8 уз существенно сокращается максимальная глубина обнаружения и значительно возрастает мертвая зона. На рис. 59,6 показано, как при нескольких проходах судна с рыболокатором "Сарган" (скорость 9 уз) над искусственной целью с Rэкв=10 см на предельной глубине обнаружения (высокочастотный тракт) на ленте самописца от нее фиксировался только один эхо-сигнал (цель можно было различить на эхограмме лишь благодаря известной глубине ее нахождения и регистрации груза, подвешенного на фиксированном расстоянии от цели).
Значительно больший эффект в отношении поиска рыбы, качественной, количественной и видовой оценки скоплений и расшифровки регистрируемых показаний рыбы и ее скоплений дает применение рыболокаторов с параллельными низкочастотными и высокочастотными трактами, особенно при их одновременной работе и воспроизведении показаний на различных участках ленты самописца с многоперьевой гребенкой, а также с вращающимся пишущим электродом и блоками электронной памяти или панорамном электронном индикаторе, например цветном. При одновременной работе высокочастотные и низкочастотные тракты дополняют друг друга, обеспечивая выдачу более полной информации об обнаруживаемых скоплениях рыбы.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'