Особенности поиска рыбы, в мелководных внутренних водоемах и приповерхностных слоях
Многие из внутренних водоемов имеют максимальную глубину, не превышающую 10-20 м. Рыболокационная аппаратура в них используется в основном при изучении запасов и оценке распределения рыбы в пределах водоема в различные периоды года, что имеет важное значение для ведения более рационального промысла. Так как в мелководных водоемах плотные концентрации образуют лишь рыбы малых размеров (корюшка, снеток, ряпушка, молодь крупных рыб и др.), а крупные рыбы, как правило, держатся разреженно, то рыболокаторы должны обеспечивать уверенную регистрацию отдельных рыб.
Весьма малые глубины сильно ограничивают возможности применения рыболокаторов горизонтального действия в указанных водоемах вследствие большого влияния поверхностной и донной реверберации, хотя в некоторых случаях, например при ровном дне и тихой погоде, горизонтальное зондирование с помощью высокочастотных рыболокаторов с узкими характеристиками направленности оказывается достаточно эффективным, особенно при наличии систем стабилизации акустических антенн.
В связи с этим при поиске рыбы в мелководных районах в настоящее время в основном применяются рыболокаторы вертикального действия.
Ширина зоны действия рыболокаторов на малых глубинах значительно меньшая, чем на больших, при одних и тех же характеристиках направленности акустических антенн. Показания рыбы на эхограмме рыболокатора можно выделить, если от нее поступает не менее трех эхо-сигналов за время прохождения над ней судна или шлюпки с рыболокатором. Исходя из этого, для регистрации рыб, начиная с глубин 2-3 м, рыболокатор должен иметь достаточно широкую характеристику направленности акустической антенны в продольной плоскости Qпp (в соответствии с формулой) [41]
где θпр - угловая ширина характеристики в продольной плоскости;
h - глубина регистрации рыб;
n1 - частота следования зондирующих импульсов рыболокатора.
Так, например, при скорости поиска 10 уз (vc=308,7 м/мин), частоте следования импульсов n1=372 имп. в минуту, имеющейся в рыболокаторе "Муксун" при диапазоне записи 0-30 м, необходима антенна с характеристикой до 60°; при vc=5 уз - соответственно ≈34°; 2,5 уз≈18° и т. д.
При меньшем числе эхо-сигналов от одиночной рыбы они будут воспроизводиться в виде отдельных штрихов или точек и их сложно будет отличить от отметок помех, почти всегда присутствующих на ленте самописца. Распознаваемость эхо-сигналов от рыбы можно улучшить снижением поисковой скорости, расширением характеристики направленности антенны или увеличением скорости развертки времени самописца.
В регистраторах с механической разверткой времени верхний предел скорости записи ограничивается возможностями кинематической системы самописца (при большой скорости движения пера снижается надежность его работы). При применении в рыболокаторах многоперьевых самописцев с электронной дискретной разверткой времени верхний предел скорости записи практически не ограничивается и она может определяться лишь временем распространения звука от антенны до границы просматриваемого диапазона и обратно (при диапазоне 10 м составляет около 15 мс; 20 м - 30 мс, 40 м - 60 мс и т. д.). При выборе скорости записи (и частоты следования зондирующих импульсов) в соответствии с указанными значениями может быть получено достаточное количество эхо-сигналов от отдельных рыб, начиная с наименьших глубин регистрации - единиц метров практически во всем возможном диапазоне скоростей поиска.
Ограничения по скорости развертки отсутствуют и при использовании в рыболокаторах электронных индикаторов панорамного типа на ЭЛТ телевизионного типа (цветных и черно-белых) [33]. Рыболокаторы с такими регистраторами и индикаторами также позволяют получать большой масштаб записи и воспроизведения сигналов.
При использовании электронных блоков памяти можно получить расширение масштаба регистрации и на самописцах обычного типа с движущимися пишущими электродами за счет медленной скорости считывания данных [22].
Рыболокаторы для малых глубин обычно имеют характеристику направленности 15-20°, при этом ширина зоны действия прибора на глубине 20 м составляет около 6 м, на глубине 10 м - 3 м и т. д. При ширине характеристики 40° она увеличивается в два раза. Малая ширина зоны действия аппаратуры соответственно приводит к сокращению площади, обследуемой рыболокатором в единицу времени, что необходимо учитывать при выборе галсов во время проведения поисковых работ.
Эффективность поиска в мелководных районах, а также в приповерхностных слоях при использовании рыболокаторов вертикального действия со стационарно установленными антеннами существенно снижается из-за распугивания рыбы при движении судна. Опыт применения рыболокационных приборов и проведенные подводные наблюдения [11, 83] показывают, что на глубинах от 1 до примерно 10 м рыба часто изменяет свое поведение при подходе к ней моторной шлюпки и тем более судна и стремится уйти в сторону или к грунту. В солнечные дни рыба может реагировать и на надвигающуюся тень от шлюпки и судна. В результате рыба может быть не зафиксирована рыболокационной аппаратурой с движущегося плавсредства или будут получены данные, не соответствующие действительной обстановке в обследуемом районе. Эффективность обнаружения рыбы на малых глубинах (от 1 до 10 м) может быть обеспечена при буксировке акустических антенн рыболокаторов в стороне от судна на некоторой глубине (рис. 62, а, б) [11, 83].
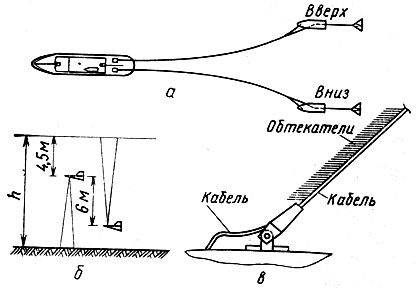
Рис. 62. Рыболокация в мелководных районах: а и б -расположение носителей и антенн; в - кабель с обтекателями
Для просмотра водной среды от поверхности воды до дна применяются два рыболокатора с антеннами, буксируемыми на кабеле с обтекателями (рис. 62, в) с той и другой стороны судна, причем одна антенна устанавливается в носителе излучающей поверхностью вверх, а другая, буксируемая на несколько большей или меньшей глубине, - излучающей поверхностью вниз (буксировка антенн на разных глубинах исключает образование мертвых зон рыболокаторов) (см. рис. 62, б). На рис. 63 представлена эхограмма, полученная при зондировании пространства в направлении поверхности воды. На ней видна запись эхо-сигналов от турбулентного слоя, вызываемого движением судна при недостаточном удалении антенн от зоны действия кильватерной струи, и от рыбы у поверхности воды. Для спуска и подъема носителей акустических антенн может быть использована небольшая кабельная лебедка или вьюшка с двумя барабанами.
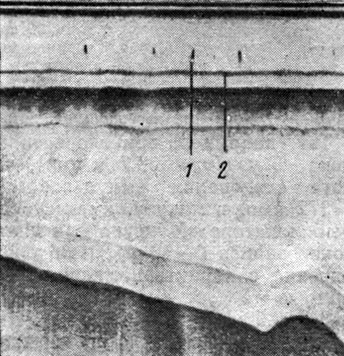
Рис. 63. Эхограмма, полученная при зондировании вверх: 1 - эхо-сигналы от рыбы; 2 - то же, от поверхности
Увеличение просматриваемой зоны может быть получено при применении одной или двух акустических антенн с узкими характеристиками направленности в вертикальной плоскости, устанавливаемыми в носителе с излучением акустической энергии в горизонтальном направлении в одну или в обе стороны от носителя (перпендикулярно движению носителя). Эффективность такого способа будет снижаться при волнении моря и неровном дне из-за влияния поверхностной и донной реверберации. Для получения более высокой разрешающей способности и уменьшения размеров антенн в этом случае целесообразно применение высокочастотных рыболокаторов.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'