Применение средств промысловой гидроакустики при разноглубинном траловом лове
При разноглубинном траловом лове, особенно при облове косяков и скоплений в поверхностных и промежуточных слоях воды на достаточно больших отстояниях рыбы от дна, рыболокаторы частично выполняют те же функции, что и при кошельковом лове. Это относится к поиску рыбы и к определению параметров косяков и скоплений. Номограмма, представленная на рис. 69, б, позволяет определять глубину нахождения косяка по наклонной дальности до него и углу наклона характеристики направленности рыболокатора. Перед отдачей трала и непосредственно в процессе самого траления методика использования рыболокационной техники существенно отличается от применяемой при замете кошелькового невода. Во-первых, в случае прицельного разноглубинного тралового лова только комплексное применение различных типов средств промысловой гидроакустики обеспечивает его высокую эффективность (при кошельковом лове, как правило, используются только рыболокаторы горизонтального действия).
Во-вторых, в связи с большим диапазоном глубин тралового лова (от самых малых глубин до глубин, превышающих 1000 м) методика применения гидроакустических приборов в значительной степени определяется условиями промысла, в том числе глубинами траления.
При прицельном разноглубинном лове в общем случае участвуют три типа средств промысловой гидроакустики: рыболокаторы горизонтального действия, рыболокаторы вертикального зондирования и траловые зонды - телеметрическая аппаратура контроля параметров орудий лова и подводной обстановки в зоне их действия [28]. При кошельковом лове лишь иногда применяются телеметрические гидроакустические приборы контроля времени и глубины погружения нижней подборы невода (в основном лишь при проверке и испытаниях новых неводов, хотя более широкое их использование представляется целесообразным, в частности при наличии подводных течений, влияющих на характер погружения подборы невода во время кошелькования).
При облове тралом скоплений рыбы, находящейся в поверхностных слоях воды в виде небольших стаек или косяков, после обследования акватории путем горизонтального и вертикального лоцирования трал выводится на необходимый горизонт с помощью траловых зондов (при постановке трала необходимо учитывать направление и скорость течения). Затем в процессе траления рыболокационной станцией ведется впереди судна поиск наиболее плотных и крупных косяков, примерно в пределах ±45° левого и правого борта, исходя из возможностей маневрирования судна с тралом. Одновременно рыболокатором вертикального действия постоянно регистрируются эхо-сигналы от косяков под килем судна, тем самым уточняется отстояние их от поверхности воды для корректировки горизонта хода трала по показаниям тралового зонда. В некоторых случаях приходится корректировать горизонт хода трала непосредственно по данным тралового зонда, если при движении трала на заданной глубине, выбранной на основании показаний рыболокатора, зонд не фиксирует рыбы в устье трала. Часто это связано с уходом косяка рыбы в более глубокие слои воды или в сторону от курса судна под действием шума, издаваемого проходящим над косяком судном.
В связи с этим при облове рыбы разноглубинным тралом на малых глубинах необходим некоторый запас мощности главного двигателя и траловой лебедки для вывода трала на горизонт нахождения косяка.
На рис. 74, а представлена схема работы судового гидроакустического комплекса аппаратуры при облове рыбы тралом в толще водной среды.
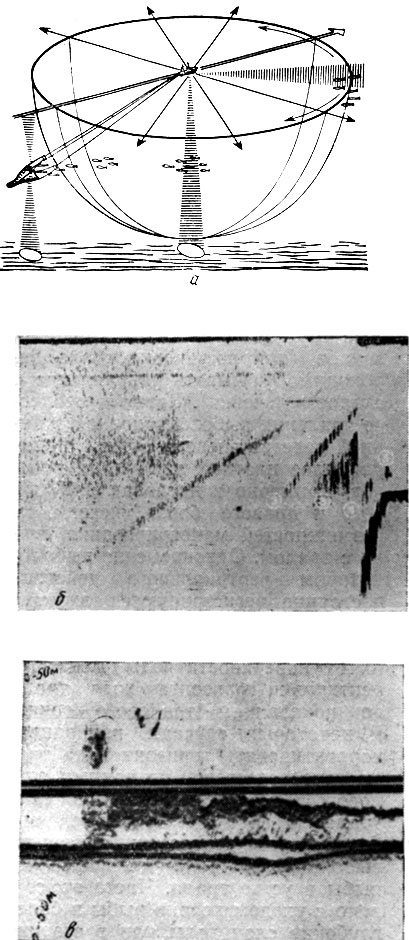
Рис. 74. Схема работы гидроакустической аппаратуры при разноглубинном траловом лове (а) и эхограммы рыболокатора при горизонтальном и вертикальном лоцировании (б) и тралового зонда (в) (косяк частично захвачен тралом и движется со скоростью трала)
При облове отдельных крупных косяков или скоплений на больших глубинах тактика использования рыболокатора горизонтального действия частично меняется. После обнаружения косяка судно подходит к нему на некоторое расстояние, сбавляет скорость для оценки параметров косяка и подготовки к отдаче трала. После определения характеристик косяка судно выходит на курс траления. Трал отдается с таким расчетом, чтобы он находился несколько выше верхней кромки косяка, определенной ориентировочно рыболокатором горизонтального действия, так как опустить трал легче и быстрее, чем его поднять, особенно при больших его размерах и недостаточных мощностях судна и траловой лебедки.
В процессе подхода к косяку с тралом оператор постоянно уточняет глубину нахождения косяка рыболокатором (и при необходимости корректируется горизонт хода трала), т. е. следит за косяком путем постепенного изменения наклона акустической антенны иногда практически до момента прохождения судна над ним. При использовании устройств повышения помехоустойчивости рыболокатора (например, корреляторов, блоков накопления [25]) возможно слежение за косяком и в кормовых курсовых углах для более точного вывода трала на скопление. При прохождении судна над косяком уточняют горизонт его нахождения и по полученным данным более точно устанавливают глубину хода трала. Наиболее результативным улов обычно бывает тогда, когда устье трала выводится на верхнюю половину косяка, зарегистрированного рыболокатором вертикального действия. Указанная методика работы применяется при тралениях больших косяков и скоплений.
Поведение рыбы в устье трала оценивается по показаниям тралового зонда, когда косяк начинает им фиксироваться. Если характер записи остается подобным записи, полученной на ленте самописца судового рыболокатора при вертикальном зондировании, значит, рыба не задерживается в устье трала. Когда же запись отметок эхо-сигналов от рыбы в устье трала по продолжительности значительно больше ширины записи отметок эхо-сигналов от косяка под судном, необходимо увеличить скорость траления, так как рыба движется в устье трала со скоростью, равной скорости судна [28].
Если скопление большое, то иногда после прохода косяка тралом судно разворачивается с тралом на обратный курс, и проводится повторное траление по этому скоплению.
При наличии в районе работы судна сравнительно небольших косяков рыболокатором горизонтального действия постоянно проводится зондирование обстановки впереди судна для обеспечения выхода судна с тралом последовательно на ряд косяков. В этом случае слежение за очередным косяком до прохода над ним судна не проводится. После оценки глубины нахождения этого косяка на небольшом расстоянии от судна и корректировки курса судна в соответствии с его угловым положением в горизонтальной плоскости рыболокатором продолжается поиск в дальней зоне. С помощью рыболокатора вертикального действия уточняется фактическая глубина нахождения косяка и ведется наблюдение за прохождением его в устье трала с помощью тралового зонда. Подобным образом проводится траление следующих косяков.
Прицельный разноглубинный лов в большинстве случаев требует одновременной работы всего комплекса указанных средств промысловой гидроакустики, так как объекты лова не являются стационарными целями, часто меняют свое поведение, перемещаются как в вертикальной, так и в горизонтальной плоскостях за сравнительно короткий промежуток времени. Особенно важны одновременная работа рыболокатора вертикального действия и тралового зонда (во всех случаях) и наблюдение за их показаниями, так как по характеру изменения записей эхо-сигналов от одних и тех же косяков в районе судна и в районе трала можно быстро оценить возможные изменения в поведении рыбы под влиянием трала и своевременно скорректировать или поменять методику и тактику облова. Это обеспечивает наиболее производительную работу судна при добыче рыбы.
Иногда под влиянием течений трал во время траления идет не в кильватере судна, а в стороне от него. В таких случаях целесообразно не проходить над обнаруженными косяками, а оставлять их с левого или правого борта в зависимости от положения трала. Расстояние от судна до косяка при прохождении его на траверсных курсовых углах при этом может быть определено с помощью номограммы (см. рис. 69, г), на которой нанесена шкала дальностей и углов на косяк в горизонтальной плоскости. Например, если косяк обнаружен на расстоянии 500 м под углом 15° левого борта, то судно при неизменном курсе пройдет около него при курсовом угле, равном 90°, на расстоянии около 120 м.
В некоторых случаях до отдачи трала с помощью рыболокационной аппаратуры проводят всестороннюю оценку обнаруженного косяка, т. е. заканчивают измерение параметров, проходя над ним, уточняя глубину нахождения и вертикальную протяженность косяка при вертикальном лоцировании. После этого судно разворачивается и выходит в точку отдачи трала, выбранную с учетом полученных данных, а также направлений ветра и течения.
На рис. 74, б приведена эхограмма, полученная с помощью рыболокатора горизонтального действия в процессе поиска, затем обнаружения косяка рыбы в толще воды, находящегося на довольно небольшом отстоянии от дна на средней глубине, определения его пара метров и непрерывного слежения за ним, включая момент прохождения траулера над этим косяком. При работе рыболокатора (SКЗ-Симрад) на максимальной чувствительности проводился поиск рыбы (левая часть эхограммы; включенный диапазон станции 0-1500 м). Контакт с косяком был получен на расстоянии около 1350 м. Судно уменьшило ход, изменило курс в направлении косяка и стало подходить к нему, готовя пелагический трал к отдаче 1. В точке 2 был переключен диапазон дальности 0-750 м при расстоянии до косяка около 400 м. В этот период проводилась оценка параметров косяка поворотом антенны от одной его кромки до другой, что видно из записи (прерывистая). При приближении к косяку постепенно изменялся угол наклона характеристики антенны. В момент, соответствующий положению 3, стали фиксироваться донные эхо-сигналы после трассы отметок эхо-сигналов от косяка. В точке 4 был включен диапазон 0-250 м, и расстояние от косяка составило 150 м. Антенна при этом наклонена еще больше, о чем свидетельствует характер отметок эхо-сигналов от дна. В положении 5 судно проходит над косяком с антенной рыболокатора, направленной вертикально вниз. Уточненная глубина нахождения косяка составляет 125 м, глубина места 140 м. На рис. 74, в видно, что косяк частично захвачен тралом и движется со скоростью трала. Другая часть косяка оказалась над тралом. Таким образом, данные эхограммы содержат записи эхо-сигналов при различных стадиях использования комплекса судовой гидроакустической аппаратуры на разноглубинном прицельном траловом лове.
Некоторые промысловые рыбы (скумбрия, сельдь, ставрида, сардина и др.) совершают суточные вертикальные миграции в довольно большом диапазоне глубин. Утром, когда рыбы опускаются к грунту, верхняя подбора трала должна находиться ниже верхней кромки записи эхо-сигналов от косяка на регистраторе судового рыболокатора (на величину, зависящую от скорости опускания рыбы и расстояния от судна до трала, вернее времени подхода трала в точку нахождения косяка при его регистрации рыболокатором), а вечером, когда рыба поднимается в поверхностные слои воды, - выше верхней кромки косяка.
Важное значение для эффективного прицельного разноглубинного лова имеет правильное расположение в рулевой рубке средств промысловой гидроакустики и управления положением трала по глубине и горизонту, так как операции по корректировке положения трала должны проводиться весьма оперативно с учетом большой инерционности трала и оператор должен иметь возможность постоянно наблюдать за показаниями приборов и оперативно управлять судном и тралом, не отходя от индикаторов аппаратуры. Достаточно оптимальное размещение выходных устройств воспроизведения подводной обстановки и средств управления судном и тралом показано на рис. 75.
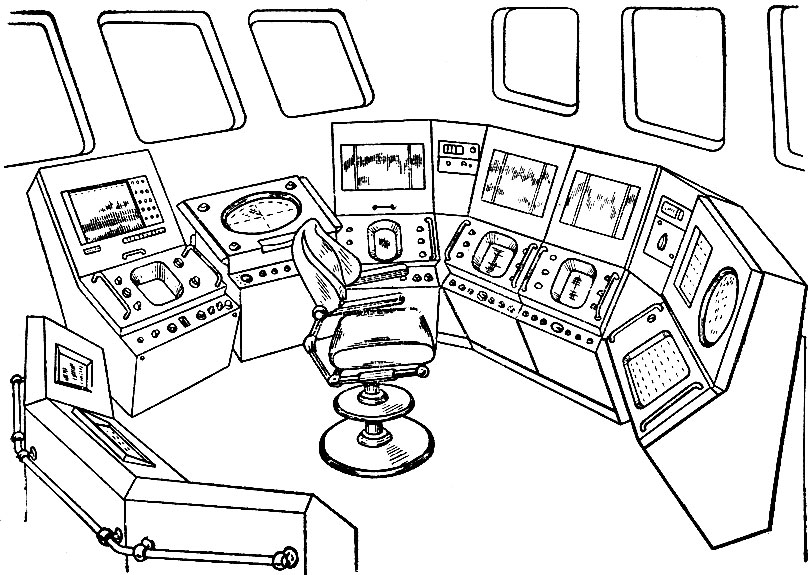
Рис. 75. Рациональное размещение рыболокационной аппаратуры в рулевой рубке промыслового траулера
Учитывая наличие большого количества средств промысловой гидроакустики, обеспечивающих ведение прицельного тралового лова, самое серьезное внимание следует уделять разработке и созданию объединенных (комплексных) устройств воспроизведения и представления принимаемой информации, на которых концентрировались бы основные данные, необходимые для судоводителя, конечно, с обеспечением наглядности и удобства ее восприятия, анализа и оценки.
Некоторым шагом в этом направлении является применение самописцев с большой шириной бумаги (для обеспечения наглядности - достаточно крупного масштаба), на которой одновременно регистрируются как информация от рыболокаторов горизонтального и вертикального действия, так и данные траловых зондов. В этом случае облегчается работа оператора, так как ему не нужно попеременно наблюдать за показаниями разных индикаторов (что в некоторой степени рассеивает внимание и увеличивает время, необходимое для проведения объективного анализа обстановки и принятия правильного решения).
В качестве примера подобного подхода можно привести гидроакустические аппараты FWGT фирмы "Фуруно" и WG фирмы "Кайо Денки" (Япония). Каждый из этих аппаратов представляет собой комплекс, включающий двухчастотный рыболокатор вертикального действия и траловый зонд, объединенные одним регистрирующим устройством с шириной бумаги 300 мм. Применение такого комплекса существенно повышает эффективность использования аппаратуры на промысле. В аппаратуре FWGT предусмотрена возможность комбинирования следующих режимов регистрации эхо-сигналов: обычная запись эхо-сигналов на всей ширине ленты, обычная запись на половине ширины в совокупности с расширенной записью обстановки, с участка, выбранного в пределах диапазона, на 1/2 ширины бумаги; регистрация эхо-сигналов на одной половине ширины ленты от низкочастотного тракта (28 кГц), а на другой половине - эхо-сигналов от той же рыбы на частоте 50 кГц: обычная запись (на половине ширины ленты) плюс расширенная запись с узкого участка (на одной четверти ширины ленты) и запись эхо-сигналов тралового зонда от нижнего эхолотного датчика на второй четверти ширины бумаги; обычная запись (на половине ширины ленты), запись эхо-сигналов с придонного участка с привязкой к грунту (на одной четверти ширины ленты), а также запись тралового зонда (на одной четверти ширины ленты); обычная запись (на половине ширины ленты) и запись всей информации тралового зонда, температуры и эхо-сигналов верхнего и нижнего эхолотных датчиков (на второй половине ширины ленты); обычная запись (на половине ширины ленты) и запись тралового зонда от нижнего эхолотного датчика (на второй половине ширины ленты). Эхограмма с одновременной записью данных рыболокатора и тралового зонда показана на рис. 76 (аппаратуры WG).
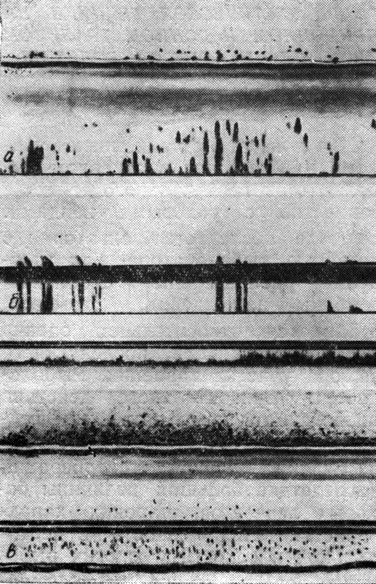
Рис. 76. Одновременная запись на самописце с большой шириной бумаги информации рыболокатора и тралового зонда: а - придонных скоплений в обычном масштабе и в более крупном с привязкой к дну; б - с дополнительной регистрацией информации тралового зонда; в - запись в обычном масштабе данных от рыболокатора и зонда
Имеются и более сложные комплексные системы обеспечения облова рыбы, объединяющие средства не только промысловой гидроакустики, но и навигационного обеспечения (в том числе лаги, гирокомпасы и др.), и отображающие на специальных электронных индикаторах-планшетах (или индикаторах ситуации) обобщенный и представленный в наглядном виде процесс облова после соответствующей обработки всего объема получаемой информации (см. главу III).
При облове тралом рыбы на небольших глубинах с помощью гидроакустической техники можно получать необходимые сведения практически от момента обнаружения скоплений аппаратурой горизонтального действия (с однолепестковыми характеристиками или более современной - одновременного панорамного обзора) до попадания рыбы в куток трала (с помощью телеметрических индикаторов степени наполнения трала водой [28]. В течение этого периода аппаратура промысловой гидроакустики обеспечивает получение данных для слежения за рыбой при подходе к ней судна с тралом, для вывода трала на заданный горизонт, для уточнения параметров скоплений и косяков при прохождении над ними судна, информации о попадании рыбы в устье трала, а также о положении ее относительно трала по вертикали и параметрах трала. Рыболокаторы с устройствами помехозащиты позволяют также получать данные о рыбе и трале в кормовых секторах судна, т. е. наблюдать процесс встречи трала с косяком для учета возможных изменений поведения рыбы от момента прохождения над ней судна до момента подхода к ней трала (для корректировки схемы последующих тралений). Так как в данном случае трал находится на небольшом расстоянии от судна, указанный промежуток времени составляет лишь несколько минут, и в связи с достаточно большой инерционностью системы судно - трал корректировку положения трала в больших пределах осуществить за короткое время весьма сложно.
В связи с этим дополнительное совершенствование информационного обеспечения целесообразно лишь в части некоторого развития траловых зондов для получения данных не только о положении рыбы относительно трала в вертикальной, но и в горизонтальной плоскости для более точной и объективной оценки возможных изменений поведения рыбы в зоне трала при ее облове и учета этих факторов при следующих тралениях.
Для этого вполне достаточно применения в траловых зондах двух эхолотных датчиков правого и левого направления, зондирующих обстановку под углом 90° к курсу трала. В траловых зондах с многоперьевыми регистраторами и самописцами с памятью обеспечение записи данных от дополнительных датчиков не представляет серьезных затруднений и может проводиться на отдельных участках ленты. Кроме того, такие данные могут воспроизводиться на электронных индикаторах с линейной разверткой в четырех направлениях [28].
При тралениях на больших глубинах расстояние между тралом и судном больше, чем при тралении в поверхностных или промежуточных слоях и, следовательно, продолжительнее будет промежуток времени для корректировки положения трала, исходя из возможных изменений положения облавливаемого косяка в пространстве после прохождения над ним судна или отклонения трала под воздействием течений. Кроме того, могут быть большими и абсолютные величины отклонений трала от курса судна, приводящие к тому, что косяк не будет захвачен тралом даже при точном измерении глубины его нахождения рыболокатором вертикального действия, правильном определении горизонта хода трала сетевым зондом и нормальных параметрах трала.
При большом расстоянии между тралом и судном даже рыболокаторы, способные работать в кормовых курсовых углах, не могут обеспечить получение данных с требуемой точностью для наведения трала на косяк (вследствие недостаточной разрешающей способности, рефракционных ограничений и других факторов). Для повышения точности определения углового положения трала относительно судна (в горизонтальной плоскости) разрабатываются акустические буи для установки на трале и последующего их пеленгования с помощью судовой рыболокационной аппаратуры. Однако более целесообразным представляется создание траловых локационных систем обзора в передней зоне перед тралом, обеспечивающих информацию непосредственно о положении косяка относительно трала после прохода над ним судна для более точного наведения трала на косяк [16, 27].
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'