Глава V. Биогидроакустика в промышленном рыболовстве
Большое значение звука в жизни рыб и ряда других водных биологических объектов, сравнительно большая дальность распространения его по сравнению с другими видами физических полей в воде создают благоприятные предпосылки для применения биогидроакустики [15, 34, 37] в различных областях рыбного хозяйства. В настоящее время проводятся работы по двум направлениям использования биогидроакустики в промышленном рыболовстве: поиск, обнаружение промысловых объектов по издаваемым ими звукам и определение их видового состава (посредством анализа этих звуков), а также управление поведением рыб. Однако несмотря на достаточно большой объем проведенных исследований и экспериментальных работ в области биоакустики рыб и ракообразных [34, 37, 40], представляющих наибольший интерес для рыбного хозяйства и промышленного рыболовства (в основном в части анализа и оценки возможностей первого направления), биогидроакустика находит пока еще небольшое практическое применение для повышения эффективности лова.
В связи с большим многообразием водных организмов, значительными изменениями их биоакустической активности в зависимости от ряда факторов (выполненные исследования и эксперименты свидетельствуют о сложности решения задач поиска, обнаружения и определения видового состава скоплений промысловых объектов методами биогидроакустики. Для получения информации о видовом составе скоплений необходимо создание весьма сложной техники [12]. Кроме того, уровень звуков, издаваемых промысловыми рыбами и ракообразными, часто имеет недостаточно большую величину, чтобы превысить уровень шумов и помех, создаваемых движущимся судном, на котором установлена аппаратура. Прослушивание и регистрация звуков рыб и ракообразных в условиях моря обычно возможны лишь в дрейфе судна в режиме "тишины", когда выключается большинство судовых механизмов или почти все, а аппаратура питается от аккумуляторных батарей, что, конечно, неприемлемо для промысловых судов. В то же время в ряде случаев водные организмы издают весьма сильные звуки, по уровню превышающие шумы судна и принимаемые гидроакустической аппаратурой при нахождении объектов на значительном расстоянии от приемной антенны (например, звуки некоторых китообразных принимаются уверенно на дистанциях до объекта в несколько километров). Большие помехи работе рыболокационной аппаратуре на судне очень часто создают акустические колебания высокой интенсивности в широком диапазоне частот, излучаемые дельфинами. В некоторых случаях звуковые сигналы, издаваемые отдельными промысловыми объектами, например креветками, имеют высокую интенсивность и при работе судна на небольших и средних глубинах достаточно четко регистрируются на лентах самописцев и других индикаторах обычных рыболокаторов активного действия.
В связи с этим метод пассивной локации или индикации в ряде случаев может оказаться полезным дополнительным средством обнаружения объектов лова, определения их мест нахождения и количества в районе промысла. Так, например, поиск и обнаружение некоторых видов промысловых объектов (например, тунцовых, акул) обычными рыболокаторами активного действия часто весьма затруднен из-за больших скоростей их перемещения, а также в связи с тем, что многие из них не образуют косяков. Интенсивность эхо-сигналов от таких одиночных, хотя и крупных рыб часто бывает недостаточной для того, чтобы рыболокатор горизонтального действия мог уверенно фиксировать их на больших дистанциях. Вертикальная локация также в данном случае малоэффективна из-за небольшого количества эхо-сигналов, принимаемых от таких рыб в единицу времени (они обычно находятся в зоне действия прибора в течение небольшого промежутка времени).
В некоторые периоды времени техника активной локации неэффективна и при поиске ракообразных, например креветок (из-за низкой их отражательной способности и близкого расположения к грунту, особенно когда они не находятся над дном) и крабов, а также при поиске придонных рыб, обитающих в прибрежных скалистых районах со сложным рельефом дна и др. Комплексное использование методов активного и пассивного поиска при этом позволило бы повысить возможности обнаружения объектов промысла.
Для более широкого внедрения в рыболовство метода пассивной локации и индикации (в качестве дополнительного средства поиска и обнаружения промысловых объектов) представляется целесообразным четко определить те виды объектов, обнаружение которых с помощью активной локации недостаточно эффективно (и в какие периоды времени), и провести более широкие экспериментальные исследования (по отработанным методикам) для выработки конкретных рекомендаций по его применению в зависимости от биологического состояния объектов, их поведения и других факторов, в том числе от времени года и, возможно, суток. Для этого необходимы накопление и систематизация биоакустических данных от конкретных промысловых объектов в различных районах их обитания, как это делается при проведении биологических, гидрологических и других рыбохозяйственных исследований.
В большом масштабе в последнее время проводятся исследования по использованию звука в процессах управления поведением рыб (для повышения эффективности лова, создания искусственных концентраций рыб, регулирования их движения в рыбопропускных сооружениях и т. д.) путем воспроизведения или имитации в воде в необходимые моменты звуков, вызывающих у рыб реакцию перемещения или дезориентации.
Проведенные работы свидетельствуют о способности рыб анализировать информационную структуру звуков и формировать соответствующее ответное поведение, однако эффективность акустического метода управления поведением рыб в значительной степени определяется наличием (и соответственно их учетом) данных об особенностях ответных реакций объектов на звуковые раздражители - стимулы в данном районе, в данное время года, суток в зависимости от метеорологических, гидрологических факторов и т. д., а также готовностью объектов к формированию соответствующего поведения. Поведение многих видов рыб в звуковом поле, скорость их реакции на воздействие акустических раздражителей зависят от значения звука в их жизни, но определяются не только слуховыми способностями рыбы, а и ее физиологическим состоянием. В связи с этим применение метода может ограничиваться пространственной зоной, временем года и некоторыми другими факторами [5].
Звуки, не похожие на биологические, например тональные, способны .вызвать лишь кратковременную реакцию у рыбы. При длительном воздействии данного звукового раздражителя рыбы адаптируются к нему. Самым коротким является период адаптации к монотонным звукам. К прерывистым звукам и звукам с меняющейся интенсивностью во времени, а также частотой адаптация у рыб происходит медленнее. Наиболее сильная двигательная реакция у различных видов рыб наблюдается на звуки с частотами 20-1000 Гц. Однако и на эти звуки реакция у рыбы 'нечеткая и неустойчивая. Попытки применять звуки, не имеющие биологического значения, часто оказываются малоэффективными, хотя в некоторых случаях хорошие результаты достигаются при воздействии на рыбу чередующихся комплексов звуковых раздражителей различного типа. Это может быть связано с дезориентацией рыбы, с возникновением некоторой ситуации неопределенности, вследствие чего рыба удерживается на месте после привлечения.
Более устойчивые реакции наблюдаются при воздействии на рыбу звуков биологического значения. Положительную реакцию (привлечение) в принципе можно обеспечить путем излучения, например, нерестовых сигналов, сигналов питания; отрицательную реакцию - при использовании сигналов опасности или угрозы, а также ранения или бегства. Необходимо учитывать и физиологическое состояние рыбы. Так, сытые рыбы безразлично относятся к звукам питания; созревшие для икрометания самки отчетливо реагируют на зов самца; сильные самцы не реагируют на звуки угрозы других самцов, слабые при этом уходят [34].
Помимо физиологического состояния рыбы большое влияние на ее реакцию на звуки оказывает интенсивность акустического сигнала. Например, сигнал опасности (звук хищника) большой интенсивности вызывает более сильное отпугивающее воздействие на рыбу и на больших расстояниях, чем сигнал средней интенсивности. Подобная гиперболизация звуков открывает широкие возможности для применения различных типов сигналов биологического значения (однако необходимы исследования влияния гиперболизированных сигналов на поведение рыбы в ближней зоне).
Результаты исследований показывают, что для более эффективного привлечения рыб необходимо плавно регулировать излучаемую мощность акустических колебаний и сохранять ее на таком уровне, чтобы в зоне нахождения рыбы создавался биошумовой фон, близкий к естественному. При этом необходимо учитывать, что спектральный состав, т. е. амплитудно-частотное распределение звуковых сигналов может быть различным в зависимости от расстояния до источника звука. Потери энергии сигнала при распространении и дальность его распространения определяются поглощением звука в воде, которое зависит от частоты звука (например, низкочастотные компоненты будут претерпевать меньшее ослабление на единицу длины, чем высокочастотные), а также пространственным расширением волны и уровнем окружающих шумов и помех [5].
При отпугивании рыб путем подачи соответствующих сигналов, вызывающих у них отрицательную реакцию, необходимо учитывать или прогнозировать радиус действия сигнала (на который кроме затухания звука существенно влияет и уровень шумового поля в районе), так как большая его величина может оказывать положительное влияние на работу одного судна и отрицательное влияние на работу соседних судов. Это явление, например, может иметь место при отпугивании рыбы от ворот кошелькового невода одного судна, когда косяк, облавливаемый соседним судном, может уйти или рассыпаться перед самым заметом.
Поэтому для эффективного применения различного типа устройств управления поведением рыб при промышленном лове важное значение имеет предшествующая систематическая проверка их в различных условиях промысла, с учетом физиологического состояния облавливаемых объектов и оценкой радиуса влияния излучаемых звуков в различные периоды года и время суток, а также выработка соответствующих рекомендаций по использованию аппаратуры. В этом отношении целесообразно создание устройств, обладающих направленным действием при излучении низкочастотных звуков, например, основанных на эффектах нелинейной акустики [24, 25].
Важным является вопрос определения критериев необходимой "чистоты" (или "качества") имитации привлекающих биоакустических сигналов (в какой степени звуки, имеющие сигнальное значение, могут отличаться от естественных по спектральным, временным или амплитудно-частотным характеристикам, не влияя на эффективность привлечения или отпугивания рыбы). Это уточнит требования как к электронным, так и акустическим элементам устройств управления поведением рыб и позволит более четко определять их возможности. Поскольку такие критерии пока не выработаны, контроль за качеством имитации в настоящее время осуществляется эмпирически, при постоянном наблюдении за поведением рыб и подборе оптимального режима излучения.
Много исследовательских и экспериментальных работ в области использования звука для привлечения рыб проведено в Японии [7, 69, 70]. Японские ученые считают, что применение акустического метода позволяет при крючковом лове повышать концентрацию скоплений тунцов, ставриды, скумбрии, лакендры-желтохвоста, кальмаров и других объектов в зоне облова, при лове ставными ловушками ускорять процесс лова путем привлечения рыбных скоплений в зону облова и последующего направления их в орудия лова; на кошельковом лове концентрировать разреженные скопления в зоне облова, отрывать скопления от дна и поднимать их в приповерхностные слои, перекрывать ворота для предотвращения ухода рыбы из обметанного пространства; при использовании объячеивающих орудий лова интенсифицировать процесс объячеивания объектов лова.
Был выполнен ряд экспериментов по управлению косяками желтоперого тунца и скумбрии [7, 70]. Предварительно в районе лова с помощью гидрофона были записаны звуки, издаваемые желтоперыми тунцами во время поедания приманки и охоты за кормом. Затем в садке было определено звуковое давление, на которое реагирует молодь тунца при излучении этих сигналов под водой. Далее были проведены опыты по привлечению косяков в местах нагула желтоперых тунцов. Для контроля за поведением стай использовался рыболокатор вертикального действия. Излучение указанных выше сигналов привлекало желтоперых тунцов к источнику звука, находящемуся у поверхности воды или на некотором расстоянии от нее с глубин 50-80 м, что (можно было видеть из эхограммы. Опытные обловы также показали положительные результаты.
Аналогичные эксперименты были проведены со скумбрией. После обнаружения косяка скумбрии на глубине 40-80 м судно остановилось над ним. Через 3 мин излучатель опустили на глубину 30 м и включили звуковой сигнал, имитирующий звуки питания; его уровень в зоне нахождения косяка достигал 22-23 дБ. Рыба начала подниматься к поверхности. По мере подъема рыбы поднимали и излучатель (до 10 м). Через 10 мин после начала излучения большая часть косяка поднялась до глубины 10-15 м и остановилась, что видно по эхограмме (рис. 99, а). После окончания излучения косяк рассеялся.
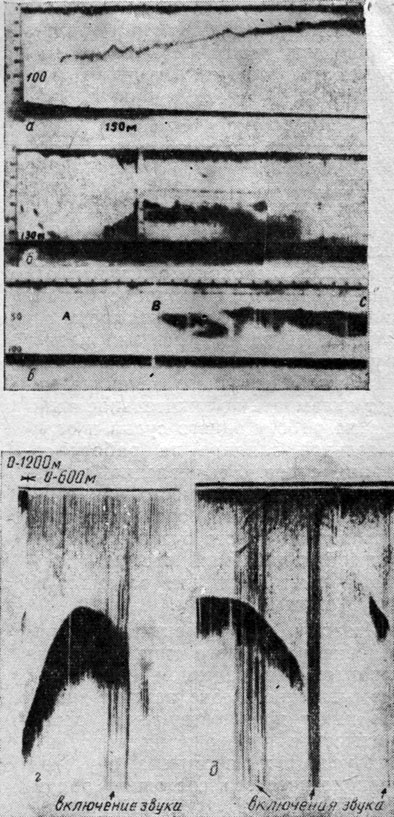
Рис. 99. Эхограммы, иллюстрирующие привлечение (а, б, в) и отпугивание (г, д) рыбных скоплений с помощью звука
Более сложный характер поведения скумбрии, свидетельствующий о том, что для эффективного воздействия на рыбу не всегда достаточно излучать сигналы одного типа, можно видеть из эхограммы на рис. 99, б. Скопление было обнаружено на глубине порядка 80 м. Когда судно остановили над ним, рыба уже опустилась на дно, на глубину 130 м. Через 7 мин излучатель опустили на глубину 60 м и спустя 2 мин после начала излучения звуков питания косяк поднялся и находился на глубине 70-100 м в течение 7 мин. Уровень звука при этом на горизонте 70-80 м составлял 31-35 дБ. Затем рыба, по-видимому, адаптировалась к излучаемым звукам и начала вновь опускаться к грунту. Излучение звуков питающейся скумбрии было прекращено, а через несколько минут начали излучать звуки питающейся молоди лакендры. В результате косяк разделился на две части (одна на глубине 90-100, другая - 120-130 м). Уровень звука на глубине 90 м был 25 дБ, на глубине 120 м - 20 дБ. Косяк находился в таком положении 5 мин до тех пор, пока не излучили звук, записанный при включении заднего хода судна (уровень звука 29 дБ на глубине 90 м). После этого косяк рассеялся (на эхограмме не показано) и излучение прекратили. Запись косяка появилась снова, когда он был на глубине 80 м, тогда опять включили звук питающейся скумбрии. Первое время запись косяка на ленте самописца была слабой, затем стала более отчетливой (скопление стало более плотным), но впоследствии косяк вновь расслоился (дезориентирующий эффект воздействия различных звуков).
Неоднократные повторения экспериментов подтвердили неплохую эффективность указанного способа управления поведением рыб. Это наблюдалось также в опытах с японской ставридой.
Эхограмма на рис. 99, в характеризует поведение ставриды при воздействии на нее звуков питающейся скумбрии. Косяк был обнаружен на глубине 70 м, судно остановилось и отдало якорь. Скопление рассеялось (см. рис. 99, в, участок А). Опустили излучатель на глубину 12 м и включили звуковоспроизводящую аппаратуру (уровень звука на глубине 20 м составлял 25 дБ). Через 20 мин косяк появился на глубине 40-60 м (см. рис. 99, в, участок В). Постепенно запись становилась более интенсивной, затем скопление заняло горизонты от 30 до 80 т и находилось на них 25 мин (см. рис. 99, в, участок С). При контрольном облове было поймано 1,5 т ставриды. Отпугивающее действие на ставриду и скумбрию оказывали также тональные низкочастотные акустические колебания, излучаемые последовательно на двух разных частотах (наиболее значительный эффект отпугивания на ставриду оказали звуки на частотах 250-350 Гц, на скумбрию - на частотах, близких к 1000 Гц) [69].
При лове кальмара была установлена эффективность звуковых сигналов, применяемых в отдельности и в различных комбинациях (звук при включении заднего хода судна, серии импульсов с частотой 600 Гц длительностью 5 с с интервалом 5 с, аналогичные импульсы с меняющейся частотой заполнения в пределах длительности, звуки питания лакендры-желтохвоста, звуки ударов дождевых капель по поверхности моря). Относительный прирост улова кальмаров благодаря применению звуковых сигналов оценивают примерно 30-60%. Положительные результаты получены и при использовании звуков питания для привлечения лососевых (например, кеты) и крабов (рис. 99, б) [69].
Проводятся исследования и по использованию звуков чистых тонов для привлечения (рыб, в частности для выработки условных рефлексов при выращивании ценных видов рыб в небольших водоемах, например, радужной форели [5].
В Японии создана промышленная аппаратура FS-12 для привлечения рыб (в частности, желтоперых тунцов, скумбрии) и кальмаров посредством излучения в воду различных звуков, записанных на магнитную ленту (в том числе и звуков, издаваемых рыбами во время поиска пищи и кормления), а также тональных сигналов в широком диапазоне частот. Указанная аппаратура состоит из двух основных блоков: бортовой аппаратуры (для выработки сигналов в звуковом диапазоне частот, а также для усиления звуков, записанных на магнитофонных лентах, и передачи их по кабелю длиной 30 м) и подводного акустического преобразователя [22, 29].
Аппаратура FS-12 имеет следующие основные технические характеристики: электрическую мощность, подводимую к акустическому преобразователю, от 0 до 20 Вт (регулируется), диапазон воспроизводимых частот 150-5000 Гц, частоты излучения тональных звуков 150, 200, 250, 300, 400, 500, 600, 700, 800 Гц (могут излучаться непрерывно или дискретно), массу бортового блока 40 кг, акустической системы с кабелем - 28 кг, размеры бортового блока 300×340×410 мм, акустического преобразователя 150×280×270 мм. Бортовой блок содержит генератор тональных сигналов, устройство воспроизведения магнитофонных записей и усилитель мощности с регулируемым выходом. Указанная аппаратура уже применяется на промысловых судах, в частности при лове кальмаров, и ее использование повышает производительность добычи на 25-30% [29].
Подобная по принципу действия и устройству аппаратура под названием "Акустолюре" выпускается в Новой Зеландии и используется для привлечения и удержания собранных скоплений тунцов, ставриды, австралийских лососей, отпугивания акул (путем излучения звуков "тревоги" и др.).
Японскими исследователями также проводятся работы по использованию звука для направления рыбы в ставные невода, отпугивания хищников, поедающих пойманных ярусами рыб и др. [7].
Работы по отпугиванию и привлечению рыб звуковыми полями проводятся и в СССР, в частности с использованием в качестве источника звука воздушно-пузырьковых завес, спектральные шумовые характеристики которых могут регулироваться [30, 31].
Так как степень затухания звука при прохождении через слой воздушных пузырьков зависит от частоты акустических колебаний, то, регулируя параметры пузырькового слоя, в принципе можно также добиться преобразования спектрального состава звукового поля за пузырьковой завесой и превращения его из отпугивающего фактора в привлекающий.
Посредством обволакивания наиболее "шумящих" элементов промыслового судна, например гребного винта, корпуса судна в месте установки главных двигателей, может быть осуществлена определенная экранировка судовых шумов, воздействующих на поведение рыбы.
Развиваются также работы по использованию звуков биологического значения, отпугивающих рыб, для повышения эффективности лова и управления поведением рыб у рыбозаградителей, около плотин гидростанций и т. д. [31].
Известно, что свистящие звуки, издаваемые дельфинами-белобочками, заставляют некоторых пелагических рыб сбиваться в более плотную массу, т. е. сигналы хищника являются сигналами тревоги для рыб. На этой основе в ТИНРО был разработан имитатор свистящих звуков дельфинов. Он состоит из устройства получения воздушно-пузырьковой завесы, создающей в воде интенсивный шум в широком диапазоне частот (с максимумами излучения, в основном приходящимися и а низкочастотную часть звукового спектра - ниже 1 кГц), и электродинамического излучателя, имитирующего высокочастотную часть общего спектра сигнала в диапазоне 3-6 кГц. Наблюдения показали, что отпугивающее действие источник звука оказывает на рыб только в том случае, если в спектре его сигнала имеются компоненты, отличающиеся от фоновых шумов природного происхождения, к которым большинство рыб адаптировано, и что отпугивающий или заградительный эффект воздушно-пузырьковой завесы находится в прямой зависимости от уровня спектральных компонентов на частотах 3-6 кГц.
Пелагические рыбы, имеющие контакт с дельфинами, реагируют на имитированные сигналы весьма активно, что позволяет использовать эти звуки как эффективное заградительное средство. Успешно прошли испытания указанного устройства на кошельковом лове сельди и скумбрии по предотвращению ухода рыбы из ворот невода [31].
Ряд удачных результатов был получен при промышленном применении устройств управления поведением с гидроакустическими широкополосными преобразователями, разработанными ВНИРО. Аппаратура использовалась на кошельковом лове дальневосточной скумбрии для предотвращения ухода рыбы из невода при его стягивании [38]*.
* (Эксперименты по излучению записанных на магнитную ленту сигналов малого горбача (представляющих собой импульсы длительностью 1-3 с, модулированные по частоте заполнения в пределах 200-6000 Гц с двумя максимумами в районе 250-320 и 1600-3000 Гц, т. е. со скользящей частотой) показали, что скумбрия имеет резкую отрицательную реакцию на эти звуки и уходит от излучателя. Аналогичная реакция наблюдалась при подаче в воду звуков белуги и гринды, а также при довольно грубой имитации сигналов этих китообразных, создаваемой с помощью звукового генератора. Скумбрия отрицательно реагирует на другие звуки, тональные и шумовые, но в этом случае быстро адаптируется к таким сигналам. Наблюдение за поведением рыбы осуществлялось с помощью рыболокатора горизонтального действия.
Активная отрицательная реакция при излучении сигналов китообразных наблюдалась и при экспериментах на дрифтерном лове скумбрии. Подача сигналов вблизи дрифтерной сети приводила к существенному увеличению улова на одну сеть, причем объячеивалась та сторона сетей, которая находилась со стороны излучателя. Ночью во время работы с искусственным светом реакцию скумбрии вблизи дрифтерных сетей можно было наблюдать визуально.)
На рис. 99, г показан процесс наблюдения за поведением косяка скумбрии с помощью рыболокатора горизонтального действия при воздействии на него звуков китообразных (излучатель устанавливался в корпусе кошелькового судна с правого борта в носовой части, что обеспечивало возможность управления поведением промысловых скоплений скумбрии как на полном ходу судна, так и в дрейфе).
Слева судно приближается к косяку (вначале включен диапазон 0-1200 м, затем 0-600 м). Подойдя к косяку на расстояние около 250 м, сейнер останавливается и излучаются отпугивающие сигналы. Сразу же после включения аппаратуры косяк начинает быстро уходить от судна, о чем свидетельствует и резкое снижение интенсивности эхо-сигналов от него (рыба озвучивается уже со стороны хвоста). Затем косяк рассеялся.
На рис. 99, д показано, как с момента начала излучения сигнала, имитирующего звуки хищника, косяк скумбрии начал уходить от судна (судно находилось в дрейфе на расстоянии от косяка около 280 м; диапазон - 0-600 м). После повторного излучения таких звуков косяк рассеялся. Второй косяк (оправа) рассеялся сразу же после кратковременного излучения звуковых отпугивающих сигналов.
Излучая в воду звуки горбача, гранды оказалось возможным останавливать движущиеся косяки и отпугивать их в сторону, противоположную излучателю. С помощью указанной аппаратуры можно прослушивать различные шумы и биогидроакустические сигналы в звуковой полосе частот, если они превышают уровень шумов, создаваемых судном.
Приведенный анализ свидетельствует о перспективности работ по использованию звука в промышленном рыболовстве, хотя необходимо еще проведение значительного объема исследований и экспериментов по выявлению и расширению возможностей метода применительно к различным объектам лова, выяснению его эффективности и границ применения в различных промысловых районах в зависимости от физиологического состояния рыбы, выработке научно обоснованных методик и рекомендаций по правильному использованию аппаратуры применительно к конкретным ситуациям промысла.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'