Методы оценки дальности действия рыболокатора горизонтального действия
При отсутствии данных об условиях распространения звука в районе работы судна или благоприятных гидрологических условиях используют и некоторые другие методы определения дальности действия рыболокационной аппаратуры.
Оценка дальности действия рыболокатора может проводиться по длительности реверберации, которая определяется по записи ее на ленте самописца или по продолжительности послезвучания в слуховом индикаторе. При большой длительности эхо реверберации отмечается на всей ширине бумажной ленты. При волнении моря длительность реверберации в сильной степени зависит от наклона характеристики направленности антенны: при небольшом ее отклонении вверх длительность реверберации значительно увеличивается, при отклонении вниз-существенно уменьшается, так как характеристика направленности лишь частично захватывает волнующуюся поверхность воды и эхо-сигналы принимаются только от слабых рассеивателей в толще водной среды. Тон слышимого эха реверберации на движущемся судне изменяется при повороте акустической антенны относительно курса судна (повышается при зондировании в носовых курсовых углах и понижается при зондировании в кормовых) с увеличением длительности реверберации, возрастает возможная дальность обнаружения рыбы. Нерегулярность реверберации на эхограммах связана обычно с качкой судна. В ряде случаев разреженные рыбные скопления ("поля") могут вызывать реверберационно подобные эхо-сигналы.
Возможная дальность действия рыболокатора может определяться при локации искусственных целей. Периодическая проверка аппаратуры по искусственным целям важна также для контроля основных параметров станций, так как при длительной эксплуатации аппаратуры в тяжелых условиях фактические значения этих параметров могут оказаться значительно ниже номинальных из-за возможных изменений технических характеристик рыболокатора, условий его работы (обрастания поверхностей антенн, их обтекателей), а также условий обтекания подводных поверхностей судна, уменьшения к. п. д. антенн из-за старения пьезокерамики, снижения сопротивления изоляции.
Для правильной оценки работы приборов, сравнения их поисковых возможностей и получаемых результатов проверка должна проводиться по стандартным целям, например по акустическому уголковому отражателю. В качестве стандартной цели при разработке и испытаниях отечественной рыболокационной аппаратуры принят уголковый отражатель с радиусом эквивалентной сферы Rэ=2 м (по отражательной способности примерно соответствующей среднему промысловому косяку рыбы). Периодическая проверка работы рыболокатора по искусственной цели целесообразна также для тренировки в его использовании, особенно при кошельковом лове.
Проверка проводится следующим образом. С борта судна в воду опускают уголковый отражатель несложной конструкции на тросе с плавучим буем. К отражателю крепят груз для удержания его в вертикальном положении. При необходимости на плавучем буе может быть установлен радиолокационный отражатель. После установки цели судно отходит от нее, затем проверяется максимальная дальность обнаружения цели на различных курсовых углах при разных скоростях судна, возможность регистрации цели при работе в кормовом секторе судна, через кильватерную струю, а также при других возможных маневрах судна [29]. Так как цель точечная, сближение с нею целесообразно начинать на малых скоростях судна. После установления контакта с целью ход судна увеличивают до максимального в поисковом режиме. Для получения более достоверного результата оценку дальности обнаружения необходимо повторять несколько раз.
Даже при постоянстве технических параметров рыболокационных станций дальность обнаружения ими промысловых объектов подвержена очень большим изменениям из-за значительных колебаний условий распространения звука в воде. Знание фактических значений этой важной тактической характеристики аппаратуры позволяет судоводителю-оператору более правильно подходить к выбору методики и галсов поиска с учетом просмотра водной среды на всем требуемом участке моря без пропусков.
При благоприятных гидрологических условиях возможная дальность действия рыболокатора будет определяться в основном его энергетическими и другими техническими параметрами. В случае отсутствия условий для проверки рыболокатора по искусственным целям (например, перед выходом судна в рейс) ожидаемая дальность обнаружения им объектов лова может быть определена на основании данных измерений технических характеристик аппаратуры.
Такую оценку можно выполнить по методу, основанному на использовании графического решения основного уравнения гидролокации, выраженного в логарифмической форме [14]. Как известно,

или
где Ра - излучаемая акустическая мощность;
γ - коэффициент концентрации антенны;
Rэ - радиус эквивалентной сферы;
ρс - акустическое сопротивление среды;
r - дальность действия;
β - коэффициент пространственного затухания звука;
Iэ - интенсивность эхо-сигнала;
Рэфф.э - эффективное значение звукового давления эхо-сигнала;
δ - коэффициент распознавания:
Iп - интенсивность помех;
Рэфф.п - эффективное значение звукового давления помех.
Так как контролируемой и измеряемой величиной гидроакустической аппаратуры активного действия является создаваемое ею акустическое давление, акустическую мощность Ра необходимо выразить через этот параметр. Выражение
т. е. приведенному акустическому давлению, создаваемому излучателем на расстоянии 1 м от его поверхности в направлении излучения.
Коэффициент распознавания δ определяется из выражения
где Кδ - коэффициент надежности приема, т. е. минимально допустимое отношение звукового давления сигнала к звуковому давлению помехи на входе устройства воспроизведения;
Δf - полоса пропускания приемного тракта;
Т - время усреднения сигнала, принимаемое на практике равным длительности излучаемого импульса (Δf считается согласованной с длительностью импульса).
Акустическое давление помех Рэфф.п (Па) на рабочей частоте f (кГц) и в полосе пропускания приемного тракта Δf (Гц) определяется как
где рп.с - звуковое давление помех, приведенное к стандартным условиям (f=1 кГц, Δf=1 Гц, γ=1).
С учетом изложенного выше можно получить выражение

После логарифмирования получаем следующее уравнение:

где 20 lg рэфф(1 м) - уровень источника звука SL.
Данное уравнение решается с помощью графика потерь распространения акустических колебаний в зависимости от рабочей частоты и дистанции до лоцируемого объекта [14, 56]. Указанный график и номограммы для определения величин, входящих в левую часть уравнения, приведены на рис. 14 и 15.
![Рис. 14. График потерь распространения звука в зависимости от f и r [56]](pic/000008.jpg)
Рис. 14. График потерь распространения звука в зависимости от f и r [56]
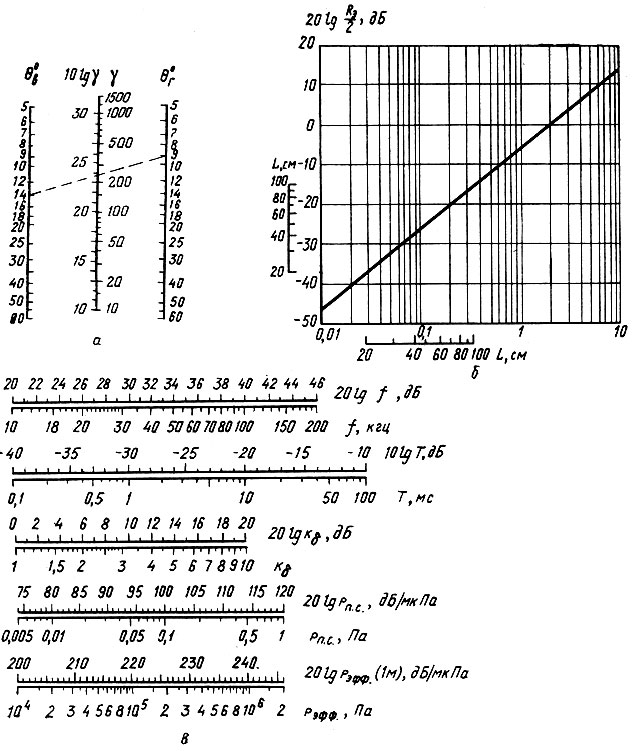
Рис. 15. Номограмма определения γ в зависимости от ширины характеристики антенны в горизонтальной θг и вертикальной θв плоскостях на уровне 0,7 - а; зависимость силы цели от Rэ - б (Rэ по оси абсцисс в м, L - длина рыбы) и номограммы для перевода f, T, Кб, Рп. с и Рэф (в дБ) - в
Пример. Требуется определить дальность действия рыболокатора "Прибой-101" при работе с узкой характеристикой направленности 9°×14° и следующих значениях его параметров: рэфф(1 м)=1,84·105 Па, Кδ=f=19,7 кГц, T=10 мс, для Rэ=2 м и pп. с=0,05 Па.
Величины γ и 10 lg γ определяют по номограмме (см. рис. 15, а) проведением прямой линии через точки θв и θг=9° и отсчетом значений в точке пересечения этой линии со средней шкалой (в данном случае 10 lg γ=23,7 дБ). Этой же номограммой с достаточной для практической оценки точностью (с погрешностью ~ 4%) можно пользоваться и для определения γ антенн с круглой апертурой, при этом принимается θг=θв=θкруг. Величину 20 lg Rэ/2=TS (сила цели) определяют из графика (см. рис. 15, б), а остальные - по номограммам (см. рис. 15, в) путем непосредственного отсчета по сдвоенным шкалам. В качестве опорного звукового давления принято звуковое давление, равное 1 мкПа. В результате расчета по номограммам получают 151,7 дБ=40 lg r + 2 βr. На графике (см. рис. 14) по вертикальной оси откладывают 151,7 дБ, проводят через эту точку горизонтальную линию до пересечения с кривой 20 кГц и получают в данном случае расстояние, равное 2,6 км.
Звуковое давление рыболокаторов определяют с помощью калиброванных гидрофонов. Гидрофон опускают в воду на глубину, соответствующую расположению акустической антенны станции. Расстояние между гидрофоном и антенной рыболокатора не должно быть меньше дистанции, определяемой по формуле
где D - максимальный размер антенны.
При проверке аппаратуры на судне указанное условие обычно выполняется достаточно легко. Разворачивая акустическую систему и поднимая или опуская в небольших пределах гидрофон, добиваются получения максимального значения сигнала на выходных устройствах измерительной установки.
Выбор оптимального для данных условий диапазона работы рыболокатора имеет важное значение для эффективного поиска рыбы. При установке слишком большого диапазона (превышающего реальную дальность станций) увеличивается время, требуемое для просмотра участка, и, кроме того, остаются необследованные зоны, так как даже при наличии объектов промысла у краев выбранной шкалы дальности эхо-сигналы от них не будут зафиксированы на воспроизводящих устройствах ввиду их малой величины (ниже порога обнаружения). При установке диапазона меньшего, чем фактическая дальность, требуется большее число судов для просмотра заданного района или большее время обследования его одним судном, что в любом случае снижает эффективность поиска рыбы. Серьезное влияние на дальность действия рыболокаторов могут оказывать подводные течения, изменяющие температурные режимы в районе промысла.
При волнении моря характеристику направленности прибора несколько отклоняют вниз для снижения уровня поверхностной реверберации. В режиме поиска обычно включают устройство автоматического разворачивания - сканирования характеристики направленности в выбранном секторе обзора.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'