Влияние гидрологических характеристик среды на работу рыболокаторов горизонтального действия
На эффективность поиска и обнаружения рыбы рыболокаторами горизонтального действия влияют гидрологические условия, определяющие характер распространения акустических колебаний в водной среде и нередко снижающие эффективность работы аппаратуры при обнаружении рыбных скоплений и поддерживании эхоконтактов с ними. Из-за рефракции акустических лучей на индикаторах аппаратуры могут воспроизводиться "лишние", "непонятные" отраженные сигналы или внезапно "пропадать" эхо-сигналы от рыбных скоплений. При наличии приповерхностных и подводных звуковых каналов фактические дистанции обнаружения объектов могут существенно превышать энергетическую дальность действия рыболокатора.
На свойства воды как звукопроводящей среды в основном влияют ее температура и частично соленость. Температура глубинных вод океана не превышает нескольких градусов и мало зависит от географического положения района, а температура поверхностных слоев существенно зависит от широты: в тропиках в течение года она близка к 25-27° С, в высоких широтах даже летом редко поднимается до 8-9° С. В тихую ясную погоду, верхние, нагреваемые солнцем слои воды медленно передают тепло нижним, и уже вблизи поверхности возникают слабые температурные градиенты, При наличии ветра верхний слой воды часто перемешивается и температура по всей его глубине выравнивается. В этом слое скорость звука с может либо слабо убывать с глубиной, либо оставаться постоянной. Во время шторма происходит активное перемешивание вод до больших глубин, толщина изотермического слоя увеличивается (может достигать 50-100 м в тропических и 500-600 м в полярных водах), а температура приповерхностных вод снижается.
Ниже перемешанного слоя лежит область наиболее высоких температурных градиентов (слой скачка), где перепад температур может достигать 0,2° С/м. Температура воды, находящейся всего лишь на 30- 50 м ниже слоя изотермии, может быть на 10-15° ниже температуры перемешанного слоя. Здесь и соленость может резко уменьшаться - на 1-1,5‰ (более высокая соленость верхнего слоя обусловлена испарением воды с поверхности). Слой скачка наиболее резко выделяется в теплых морях, где разница между температурами поверхностных и глубинных вод велика; в умеренных и высоких широтах слой скачка по тем же причинам летом выражен более четко, чем зимой (когда он может исчезнуть). Более того, в осенне-зимние месяцы в полярных водах температура поверхностного слоя может быть ниже температуры слоя, находящегося на глубине 100-200 м.
Большое влияние на термическую структуру вод оказывает проникновение в район инородных водных масс, например арктических вод через Берингов пролив в Тихий океан или теплых средиземноморских вод через Гибралтарский пролив в Атлантический океан. Жизнь многих промысловых рыб определяется системами течений, на стыках которых образуются зоны повышенной продуктивности, где обитают объекты промысла. Выход на поверхность глубинных вод, богатых питательными солями, способствует бурному развитию планктона, служащего пищей для рыб, и наблюдается в зонах разветвления течений (дивергенций), так как течение относят поверхностные слои воды. Кормовые миграции большинства океанических рыб связаны с течениями. Пришельфовые районы, особенно с крутыми склонами, способствуют подъему в зону шельфа глубинных вод, интенсивному вертикальному перемещению водных масс и возникновению районов высокой биологической продуктивности. Это, однако, приводит к значительным изменениям основных характеристик воды, влияющих на условия распространения звука, и может серьезно усложнять работу операторов рыболокаторов.
Нужно иметь в виду также, что в большинстве районов океана зависимость температуры воды от глубины в верхних слоях воды подвержена временной изменчивости с самой различной периодичностью в связи с попеременным их прогревом и охлаждением. Можно отметить сезонную, а в ряде районов месячную (рис. 3, а) и суточную изменчивость температуры воды (рис. 3, б) [92], что обусловливает так называемый послеполуденный эффект ухудшения работы аппаратуры горизонтального действия.
![Рис. 3. Примеры изменения температуры и солености морской воды: а и б - сезонные и суточные изменения температуры приповерхностного слоя вблизи Бермудских островов [92]; в, г - меридиональный и широтный температурные разрезы в Атлантическом океане; д - профиль солености, соответствующий в; е - то же, соответствующее г [1]](pic/000115.jpg)
Рис. 3. Примеры изменения температуры и солености морской воды: а и б - сезонные и суточные изменения температуры приповерхностного слоя вблизи Бермудских островов [92]; в, г - меридиональный и широтный температурные разрезы в Атлантическом океане; д - профиль солености, соответствующий в; е - то же, соответствующее г [1]
На рис. 3, в, г приведено вертикальное распределение температур в Атлантическом океане в ноябре и октябре вдоль меридиальных и широтных разрезов [1]. Колебания солености в области холодных вод сравнительно невелики; в области теплых вод они больше и зависят от солености поверхностных слоев. На рис. 3, д, е представлены кривые вертикального распределения солености воды в Атлантическом океане, соответствующие кривым температуры воды, показанным на рис. 3 в, г.
![Рис. 3. Примеры изменения температуры и солености морской воды: а и б - сезонные и суточные изменения температуры приповерхностного слоя вблизи Бермудских островов [92]; в, г - меридиональный и широтный температурные разрезы в Атлантическом океане; д - профиль солености, соответствующий в; е - то же, соответствующее г [1]](pic/000116.jpg)
Рис. 3. Примеры изменения температуры и солености морской воды: а и б - сезонные и суточные изменения температуры приповерхностного слоя вблизи Бермудских островов [92]; в, г - меридиональный и широтный температурные разрезы в Атлантическом океане; д - профиль солености, соответствующий в; е - то же, соответствующее г [1]
Температура воды оказывает наиболее сильное влияние на скорость звука, поэтому в верхних слоях, в которых, как правило, и располагаются источники и приемники акустических сигналов рыболокаторов, где температурные градиенты значительны, а влияние гидростатического давления довольно слабое, вертикальное распределение скорости звука аналогично вертикальному распределению температуры с небольшим отклонением за счет солености.
На рис. 4 а, б представлены кривые распределения скорости звука по глубине, соответствующие кривым, показанным на рис. 3, в, г, д, е, а на рис. 4, в - кривая распределения скорости звука с глубиной для одного из районов Тихого океана (август) с ярко выраженным минимумом с. Ночью вода поверхностного слоя охлаждается и ее температура может быть даже несколько ниже температуры нижележащих слоев; у поверхности при этом появляется область с небольшим положительным градиентом. На глубине слоя скачка отрицательные градиенты с могут достигать (3÷5) 10-3 1/м, а общий перепад с в слое скачка - 30-40 м/с. Минимум с в умеренных широтах находится значительно ближе к поверхности, чем в тропических (не глубже 250-500 м).
![Рис. 4. Профили скорости звука [1]: а - кривые, соответствующие приведенным на рис. 3. в; б - то же, на рис. 3, г; в - для Тихого океана; г - для приполярных и полярных районов зимой; д - для тех же районов летом](pic/000117.jpg)
Рис. 4. Профили скорости звука [1]: а - кривые, соответствующие приведенным на рис. 3. в; б - то же, на рис. 3, г; в - для Тихого океана; г - для приполярных и полярных районов зимой; д - для тех же районов летом
Зимой в высоких широтах температурные градиенты очень малы. Градиент скорости звука во всей толще воды оказывается положительным, и с возрастает от поверхности до дна (рис. 4, г). В теплое время года верхние слои воды прогреваются и отрицательные температурные градиенты вблизи поверхности иногда оказываются достаточно большими, для того чтобы образовался неглубокий подводный звуковой канал ПЗК (рис. 4, д).
В среде с изменяющейся скоростью звука акустическая энергия распространяется не по прямым, а по искривленным лучам вследствие рефракции звука из-за преломления акустических лучей при переходе из одного слоя воды в другой, отличающийся скоростью распространения акустических волн.
На рис. 5 показаны реальные лучевые картины, полученные с помощью ЭВМ при различном изменении с с глубиной. В первом случае (см. рис. 5, а) источник расположен на глубине около 30 м, углы выхода лучей из источника составляют 0-9° (показано девять лучей). На рис. 5, б представлена рефракционная картина распространения акустической энергии от источника, находящегося на глубине 15 м, при наличии изотермического слоя до глубины порядка 60 м. Лучи показаны через интервалы в 1° (от плюс 3 до минус 3°) с дополнительными траекториями лучей, выходящих под углами -1,5 и -1,76° [92].
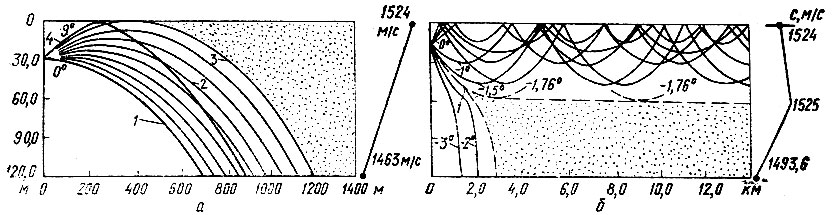
Рис. 5. Лучевые диаграммы при постоянном (а) и изменяющемся (б) градиенте
На рис. 6 а, б, г, д изображены типичные рефракционные картины распространения лучей рыболокатора при поиске рыбы в различные времена года у западного побережья Норвегии в Норвежском море (что типично для умеренных и северных широт Атлантики [50, 52]). Летом, когда верхние слои воды имеют достаточно высокую температуру, быстро понижающуюся с глубиной, лучи рыболокатора из-за отрицательных градиентов с резко отклоняются вниз и реальная дальность обнаружения рыбы рыболокатором резко сокращается - так называемая "отрицательная" рефракция. Получаемая дистанция обнаружения косяков, находящихся в поверхностных и приповерхностных слоях воды, часто не превышает нескольких сот метров вследствие появления большой зоны акустической тени (см. рис. 5, а справа и 6, а справа). Это нередко вызывает у эксплуатационников сомнения в исправности аппаратуры.
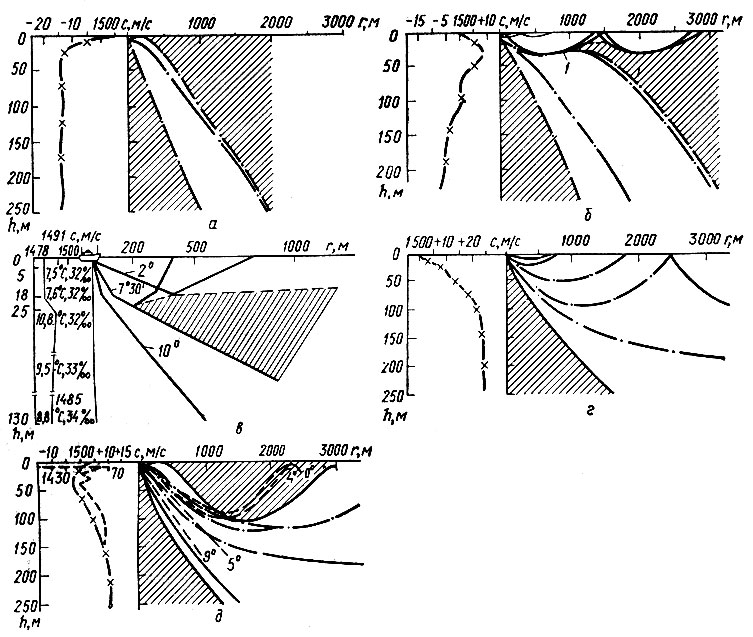
Рис. 6. Лучевые картины при сезонном изменении с: а - летом; б - осенью; в - весенне-зимний период; г - зимой; д - весной
При этом ухудшаются и условия обнаружения придонных косяков, так как акустические лучи падают на дно под большими углами (более круто) и к антенне рыболокатора приходят более интенсивные донные эхо-сигналы. В результате имеет место более сильная маскировка полезных эхо-сигналов от придонной рыбы.
Осенью и ближе к зиме условия распространения звука значительно лучше, чем летом, однако неполное перемешивание холодных и теплых вод, наличие чередующихся холодных и теплых слоев воды может вызывать появление как приповерхностных звуковых каналов (увеличивающих возможности обнаружения рыбы в слоях воды, находящихся недалеко от ее поверхности), так и больших зон акустической "тени", а также загибание акустических лучей на сравнительно небольших дистанциях. Скорость звука вначале обычно увеличивается, обеспечивая появление акустического канала, затем уменьшается, что вызывает отклонение некоторых (нижних) лучей звукового пучка станции вниз. На рис. 6, б показано, как лучи вначале отклоняются немного (примерно до дистанции 1000 м), а затем идут круто вниз, что уменьшает дальность обнаружения косяков, находящихся на глубинах, превышающих несколько десятков метров. Положительные градиенты скорости звука в данном случае начинаются от самой поверхности воды (см. рис. 6, б). В теплых водах до глубин 50-100 м ночью также иногда наблюдаются положительные градиенты скорости звука, но они малы и неустойчивы [3].
При указанных условиях происходят существенная расфокусировка акустического пучка излучателя и образование значительных зон тени ниже слоя приповерхностного звукового канала. Некоторая засветка указанной зоны может происходить под влиянием рассеянной акустической энергии, поступающей от поверхности воды при волнении моря, и вследствие проникновения звука из канала из-за неидеальности его нижней границы. На рис. 5, б и 6, б видно, что в данном случае происходит расщепление звукового луча 1, испытывающего полное внутреннее отражение на границе слоя. Верхняя часть его изгибается по направлению к поверхности моря, а нижняя - ко дну, образуя зону тени, подобную зоне тени при отрицательной рефракции.
При таких условиях распространения звука оператор рыболокатора может при поддержании акустического контакта с небольшими судами и их кильватерными струями на значительных дистанциях не обнаруживать даже плотные и крупные косяки рыбы, находящиеся в толщине водной среды, до приближения к ним судна на небольшое расстояние. Например, из лучевой картины, показанной на рис. 6, в, видно, что объекты, находившиеся в слое воды от поверхности до глубины 25 м, обнаруживались на больших расстояниях, а скопления скумбрии, располагавшиеся в основном на глубинах ниже 25-30 м, фиксировались рыболокатором лишь на дистанциях до 300-400 м. В таких условиях отсутствие данных о фактическом характере распространения звука может сильно затруднять работу оператора.
Зимой дальность распространения акустической энергии бывает наибольшей. Наличие более холодных верхних слоев воды приводит к отклонению звуковых лучей вверх от более глубоких теплых слоев (см. рис. 6, г). Получается канальный эффект, но в большем диапазоне глубин, чем в случае приповерхностных каналов звука: звуковые лучи отражаются от поверхности воды, идут вниз в более теплые слои, затем снова отклоняются вверх и т. д.
Зимой распространение акустических лучей в умеренных и северных широтах по своему характеру подобно их распространению при наличии приповерхностных каналов звука, однако такой значительно более протяженный поверхностный канал захватывает существенно больший интервал углов выхода лучей (до 15-20°). Кроме того, в обычной зоне действия рыболокаторов значительно меньшее число лучей распространяется с отражением от поверхности (которая в общем случае приводит к большему затуханию звука, чем это имеет место при распространении только в водной среде), а также практически не наблюдается расфокусировки акустического пучка и отсутствуют зоны тени. В данном случае улучшаются и возможности обнаружения косяков у дна, так как при отражении звука от грунта больше звуковой энергии распространяется в сторону от судна. Все это и создает более благоприятные условия для работы рыболокаторов горизонтального действия в указанный период.
Рефракционные картины распространения акустических лучей весной, как правило, наиболее сложны (для рыболокаторов обычного типа с подкильными антеннами), что обусловлено различным расположением холодных и теплых слоев воды (рис. 6, д). Скорость звука с сначала понижается до некоторого минимума, а затем увеличивается (т. е. от поверхности до глубины, соответствующей минимуму скорости звука, простирается область отрицательных градиентов скорости звука). Ниже этого горизонта условия соответствуют положительной рефракции звуковых лучей, т. е. положительным градиентам скорости звука.
Луч, вышедший из источника, расположенного в точке, находящейся выше минимума скорости звука (где с=с0), в горизонтальном направлении (см. рис. 6, д) сразу же отклоняется вниз (так как источник находится в области отрицательной рефракции). Этот луч пересечет ось минимума скорости звука ск под некоторым углом β1,0
где с0 - скорость звука в слое нахождения источника звука.
Далее он проникнет в нижние слои воды до некоторой глубины, на которой с вновь станет равной с0, направляется вверх, снова пересекает ось минимума скорости звука под углом βк0 достигает глубины h0 (h0 - глубина источника), поворачивает вниз, и цикл начинается сначала. Лучи, выходящие из источника под любыми другими углами, будут пересекать ось минимума с только под большими углами βк(cos βк=cos βк0 ск/с0). Граница ближней освещенной зоны будет определяться таким же граничным лучом, как и в случае обычной отрицательной рефракции. При таких условиях возникает значительная зона тени от поверхности моря, захватывающая большой интервал глубин и располагающаяся в определенном диапазоне расстояний от источника. На рис. 6, д можно видеть такую зону тени на глубине 500 и 3000 м и до глубины порядка 100 м, возникшую вследствие изменения скорости звука в пределах от 9 до 12 м/с (или менее 0,7%). В результате этого при поиске рыбы может быть получен контакт с целью на больших дистанциях (в примере 2500-3000 м и более), теряющийся при приближении к косяку на средние дистанции (в примере от 2500 до 700-800 м) и затем снова появляющийся на небольших дистанциях. В условиях, показанных на рис. 6, д пунктиром [3], повторный контакт с косяком, находящимся в приповерхностном слое (после первоначального обнаружения его на дистанции около 2000 м и более), будет получен лишь после того, как судно подойдет к нему почти вплотную. В этот период от операторов требуются очень большое внимание и натренированность. Особенно большие подобные зоны тени появляются в это время года при штилевой погоде. При волнении моря и после шторма в этом случае могут создаваться лучшие условия для распространения звука благодаря перемешиванию слоев.
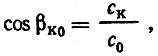
Рассмотрим влияние изменения положения акустической антенны по глубине на возможности аппаратуры при одном и том же характере изменения с (рис. 7, а). На рис. 7, а показаны лучевые картины, полученные при заглублении излучателя на ось минимума с (на ось ПЗК). В этом случае часть лучей захватывается звуковым каналом - канализуется, благодаря чему увеличивается дальность обнаружения рыбы в районе канала. Кроме того, существенно отодвигается граница зоны тени, т. е. возрастает ближняя освещенная зона в результате увеличения углов выхода лучей до граничного угла (см. рис. 7, а, луч 2 вместо луча 1). Для сравнения освещаемых зон пунктиром показаны границы зоны освещенности при подкильной установке излучателя (т. е. вблизи поверхности). Таким образом, изменяя положение излучателя по глубине, можно существенно расширить тактические параметры рыболокационной аппаратуры дальнего действия в условиях наличия ПЗК, тогда как для подкильных источников колебаний указанные условия соответствуют отрицательной рефракции. Дальность обнаружения в условиях ПЗК (при нахождении источника на его оси) в 1,5-2 раза превышает энергетическую дальность, тогда как при расположении того же излучателя у поверхности дистанция обнаружения в приведенном примере составляет не более 1 км. Ближняя освещенная зона при заглублении источника также может быть увеличена в 2-3 раза. На рис. 7, б можно видеть, как в условиях отрицательной рефракции сильно изменяются возможности обнаружения скоплений, находящихся в приповерхностных слоях, в зависимости от степени заглубления антенны рыболокатора.
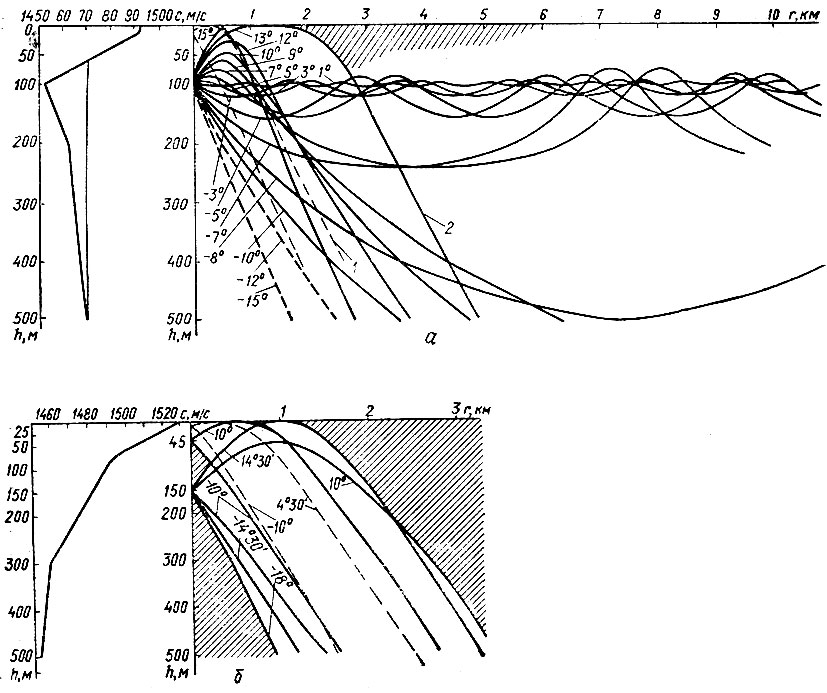
Рис. 7. Влияние погружения антенны на условия распространения звука на наличие ПЗК - а, в условиях отрицательной рефракции - б
Условия распространения звука и, следовательно, дальность обнаружения рыбы рыболокатором, могут существенно изменяться в течение короткого периода времени даже в пределах ограниченного района моря. Так, при рассмотрении реальных лучевых картин, построенных во время работы с рыболокатором "Симрад СБ2" в Северном море летом 1966 г. (рис. 8), видно сильное изменение его геометрической дальности действия на протяжении 3 сут при промысле примерно в одном районе моря [49].
![Рис. 8. Примеры изменения условий распространения звука летом [49]: а - 21. VI. 66 г. в 20 ч 40 мин, φ=57°26', λ=06°34'; б - 22. VI. 66 г. в 08 ч 00 мин, φ=58°00', λ=05°00'; в - 22. VI. 66 г. в 15 ч 00 мин. район 20 миль от Egeroya; г - 23. VI. 66 г. в 05 ч 30 мин, φ=57°47', λ=04°35'](pic/000122.jpg)
Рис. 8. Примеры изменения условий распространения звука летом [49]: а - 21. VI. 66 г. в 20 ч 40 мин, φ=57°26', λ=06°34'; б - 22. VI. 66 г. в 08 ч 00 мин, φ=58°00', λ=05°00'; в - 22. VI. 66 г. в 15 ч 00 мин. район 20 миль от Egeroya; г - 23. VI. 66 г. в 05 ч 30 мин, φ=57°47', λ=04°35'
В связи с этим операторам рыболокаторов горизонтального действия важно знать условия распространения акустических колебаний в процессе работы аппаратуры, чтобы не теряться при внезапных пропаданиях сигналов, принимаемых от обнаруженных скоплений, в случае попадания их в зону акустической тени, правильно оценивать и анализировать эхо-сигналы, обоснованно выбирать диапазоны действия рыболокатора и т. д. Это определяет необходимость регулярной оценки условий распространения звука в районах промысла [17, 19]. Перед началом поиска необходимо проанализировать гидрологические условия в обследуемом районе для оценки возможной дальности обнаружения скоплений установленным на судне рыболокатором. Так, на судах промысловой разведки регулярно проводятся гидрологические разрезы, поэтому построение лучевых картин на основании данных о температуре и солености морской воды не вызывает серьезных затруднений. В случае произвольного профиля с (h) построение лучей осуществляется путем разбивания среды горизонтальными плоскостями на слои, в каждом из которых градиент скорости звука считается постоянным, и, следовательно, реальная кривая распределения скорости звука аппроксимируется ломаной линией (рис. 9, а [36]). В этом случае траекторию луча в каждом слое можно представить в виде дуги окружности радиусом Ri:

где Gci - градиент скорости звука в i-м слое [i=1, 2, 3, 4, 5 (см. рис. 14, а)];
сг - скорость звука, при которой луч горизонтален;
βi - угол входа лучей в i-й слой (угол скольжения).
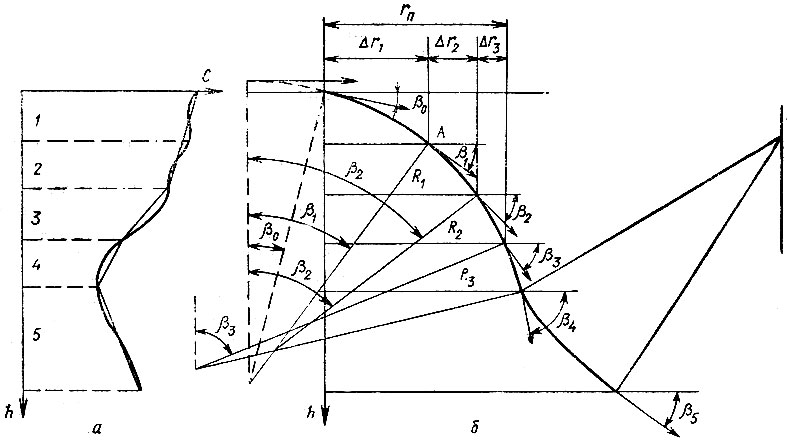
Рис. 9. К построению траектории акустического луча для любого распределения с (а, б)
Траекторию луча, проходящего через всю толщу воды, можно представить как сопряжение дуг окружностей (траекторий луча), определенных для каждого слоя в отдельности (рис. 9, б). Для сопряжения дуг достаточно знать горизонтальное расстояние Δri, которое для первого слоя равно дистанции между осью h и точкой сопряжения, для последующих слоев - между ближайшими точками сопряжения дуг. Расстояние Δr1 до первой точки сопряжения А равно

где β0 - угол входа лучей в первый слой;
β1 - угол выхода луча из первого слоя (под этим же углом луч входит во второй слой).
Выражения расстояний до последующих точек аналогичны:

Здесь

где Δci=ci - ci-1 - перепад скорости звука в i-м слое;
Δhi - толщина i-гo слоя.
Тогда
или

Формулу (1) можно представить в виде
Поскольку

то
Полное расстояние до i-й точки сопряжения будет равно
При малых углах βi для rn получим приближенное равенство
Выражение для полного расстояния rn можно получить также, использовав выражение (2):

Вычислив по формуле (3) или (4) значения r1 r2, ... и откладывая эти величины на графике вдоль границы раздела между слоями, легко построить траекторию луча, проходящего через всю толщу воды. rn можно быстро определить с помощью номограммы (рис. 10), по нижней линейке которой находят отклонение луча от горизонтального направления, соответствующее заданному Δсг.
Рис. 10. Номограммы для определения параметров траектории луча
Например, если Δсгi=1 м/с, то этому изменению скорости звука, как видно из номограммы, соответствует отклонение луча от горизонтального направления на угол β ≈ 2°. Перепад скорости звука при пользовании данной номограммой следует отсчитывать от сг, при которой луч горизонтален (Δcгi=cг - ci). Пусть задано, что источник помещен в слое, где скорость звука с1=1495 м/с, и требуется построить траекторию луча, выходящего из источника под углом β0=10°. Для этого необходимо прежде всего найти сг. С помощью нижней линейки номограммы находим, что углу β0 соответствует Δсг1=22,5 м/с. Следовательно, cг=c1 + Δcг1=1517,5 м/с.
Далее пусть требуется найти расстояние r1 от вертикали, проходящей через источник звука, до точки пересечения луча с границей между первым и вторым слоем (расстояние до первой точки сопряжения). Если при этом задано, что толщина первого слоя, отсчитываемая от уровня источника, Δh1 равна 50 м, а перепад скорости звука в этом слое Δc составляет 10 м/с (скорость звука с глубиной уменьшается), то по перепаду скорости звука, отсчитываемому от сг, находим Δсг1=32,5 м/с, а по линейке номограммы - β1=12° (под углом β1 луч покидает первый слой). Далее находим (β0 + β1)/2=11°; на номограмме по вертикальной оси отложены значения (βi + βi-1)/2.
Наклонные линии на номограмме соответствуют толщинам слоев, а горизонтальные - расстояниям Δri (в м). Таким образом, от метки на вертикальной шкале, соответствующей 11°, идем по горизонтали до наклонной линии с надписью 50, а от точки пересечения с ней опускаемся вниз и отсчитываем Δr1=250 м [36].
Величина скорости звука при известных температуре и солености может быть определена по номограмме (рис. 11). Поправка за счет глубины h может быть учтена добавлением слагаемого, равного 0,0175 h (h в м).
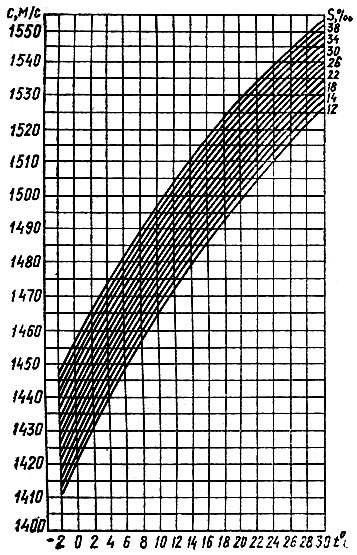
Рис. 11. Номограмма для определения с
Существенную помощь при получении лучевых картин могут оказать электронные построители и индикаторы траекторий акустических лучей. Так, индикатор траекторий "Эдо Модель 747", выпускаемый фирмой "Вэн дер Хиим электронике Корп" (Нидерланды) [43] и включающий малогабаритное электронно-вычислительное устройство, позволяет проводить быстрый расчет (время расчета одного луча 74 мс) и одновременную индикацию на ЭЛТ до 90 траекторий звуковых лучей. Его работа основана "на аппроксимации плавных изменений скорости звука с глубиной прямолинейными дискретными отрезками. Звуковые лучи воспроизводятся на электронном индикаторе с угловым расстоянием между ними, равным 0,5°. Общее их количество на экране будет определяться шириной характеристики направленности антенны.
На рис. 12 показаны два изображения с экрана аппаратуры "Эдо-Модель 647" на рис. 12, а - типичный "летний" профиль скорости звука в Средиземном море, а на рис. 12, б и в - траектории акустических лучей антенны с шириной характеристики направленности 10° (вертикальная шкала изображения на рис. 12 равна 375 м, горизонтальная - 9 км). Путем соответствующей установки органов управления с помощью подобной аппаратуры может быть быстро оценен характер распространения акустических колебаний в данном районе при различных углах наклона акустической антенны, ее характеристиках направленности, глубинах погружения при использовании буксируемых носителей и т. д. На рис. 12, в видно, что при данном профиле скорости звука антенна, буксируемая на глубине 135 м, позволяет получать лучшие условия распространения звука по сравнению с подкильной (см. рис. 12, б).
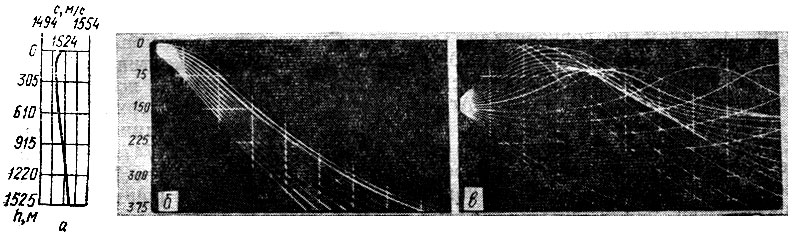
Рис. 12. Характер изменения скорости звука (а) и диаграммы лучей на индикаторе траекторий (б, в)
Поисковое судно может передать полученные диаграммы распространения акустических колебаний промысловым судам (например, с помощью фототелеграфной аппаратуры) или сообщить возможные дальности обнаружения рыбы в данном районе промысла. При отсутствии возможности непосредственной передачи лучевых картин поисковое судно может передать на промысловые суда температурные разрезы в районе лова, на основании которых траекторий лучей могут быть построены операторами рыболокаторов. В районах с изменяющимися гидрологическими характеристиками, особенно весной и осенью, целесообразна постоянная периодическая корректировка лучевых картин для своевременного учета колебаний дальностей действия рыболокаторов. Эти данные необходимы для выбора диапазона работы аппаратуры.
Многие промысловые суда оборудованы телеметрической аппаратурой контроля параметров трала и подводной обстановки в зоне их действия с измерителями температуры - сетевыми зондами [24, 23]. По данным такого телеметра лучевые картины распространения звука могут быть построены и судовыми операторами рыболокаторов с достаточной для практики точностью, так как температура оказывает доминирующее влияние на распространение звука.
В случае отрицательной рефракции геометрическая дальность обнаружения объектов, располагающихся в определенном диапазоне глубин, при известном модуле градиента скорости звука Gc (с достаточной для практики точностью) может быть определена с помощью номограммы, представленной на рис. 13. Gc определяется по данным вертикального распределения температуры с помощью формулы
где Δt - разность температур на глубинах расположения антенны ha и цели hц, °С;
tср - температура воды на средней глубине, равной Δh=(hц - ha)/2 (м), °С.
Из номограммы можно видеть, что в условиях отрицательной рефракции для обнаружения целей, находящихся у поверхности воды на дистанциях более 1000 м, необходимы |Gc| менее 0,05 1/с. Пользуясь указанной номограммой, можно решать и обратные задачи (определять любой из трех параметров по двум известным).
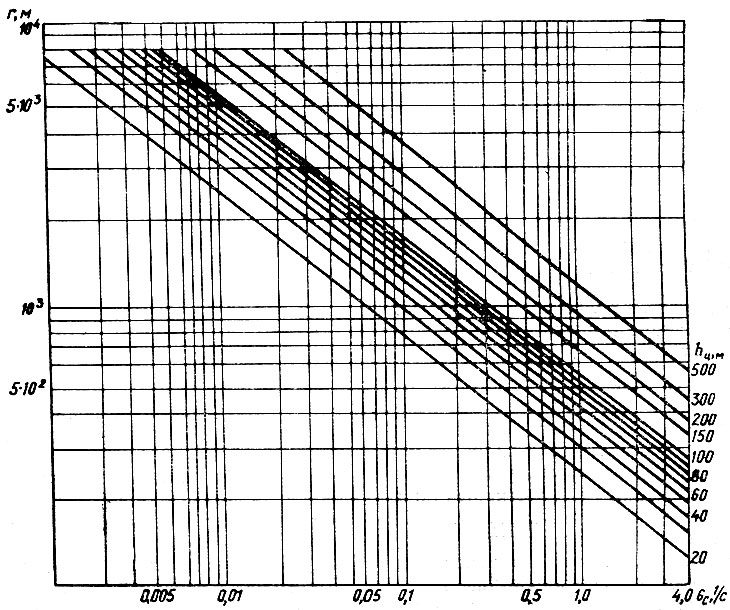
Рис. 13. Номограмма для определения дальности обнаружения рыболокатора при отрицательной рефракции
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'