Слежение за обнаруженным скоплением
Рассмотрим процесс сближения судна с косяком. Допустим, косяк рыбы обнаружен в момент нахождения судна в точке А (рис. 68, а), приблизительно под углом 45° правого борта. Между точками А и В судно сохраняет прежний курс. На ленте самописца фиксируется трасса с небольшим наклоном, так как дистанция до косяка уменьшается. Перерывы в записи эхо-сигналов связаны с изменением направления на косяк и выходом его в некоторые моменты из зоны действия рыболокатора. При пропадании контакта с косяком оператор поворачивает антенну вправо. В точке В судно меняет курс вправо, тогда антенну необходимо развернуть к носу судна, т. е. влево на 10-15°, и оставить в этом положении до тех пор, пока на самописце, слуховом или электронном индикаторах не будут фиксироваться эхо-сигналы от косяка. После регистрации нескольких эхо-сигналов антенна вновь поворачивается на 10-15° влево и процесс повторяется до тех пор, пока судно не выйдет на новый курс. Если при повороте антенны влево после нескольких (пяти-шести) посылок эхо-сигналы от косяка не фиксируются, необходимо повернуть антенну на несколько градусов в обратном направлении до их появления. Это может, например, иметь место при перемещении косяка. Тогда вновь корректируется курс судна в соответствии с новым положением косяка. То обстоятельство, что судно после поворота не сразу выходит на новый курс, должно учитываться операторами рыболокаторов для надежного удержания контакта с обнаруженным скоплением.
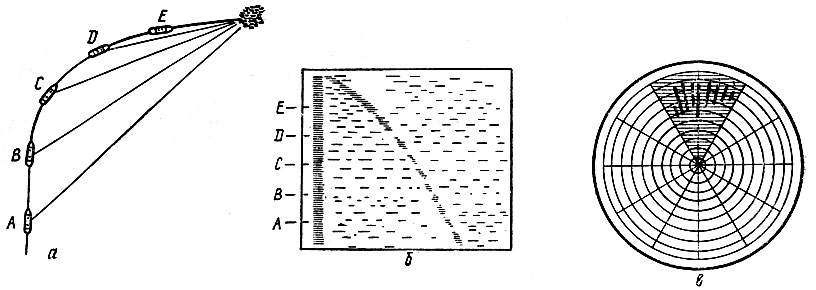
Рис. 68. Процесс сближения судна с косяком (а), эхограмма косяка (б) и изображение косяка на индикаторе с секторной разверткой (в)
В некоторых рыболокаторах (например, в "Саргане") электронный индикатор связан с репитером гирокомпаса, что облегчает работу оператора при слежении за косяком или скоплением рыбы во время маневрирования судна. При обнаружении косяка оператор сразу отмечает пеленг на него и затем может быстро найти цель при временной потере контакта с ней [23].
Большую помощь оператору при слежении за скоплением во время маневрирования судна оказывают устройства автоматического сопровождения цели, предусмотренные в некоторых рыболокаторах [17]. После выбора объекта для облова оператор включает систему "захвата" и происходит автоматическое слежение за косяком при выходе судна в исходное положение для последующего облова скопления.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'