Определение основных параметров скопления
После приближения к косяку оператор определяет его основные параметры - горизонтальную протяженность и протяженность в направлении зондирования, размер по вертикали, глубину расположения, ориентировочную плотность и максимум плотности, скорость и направление перемещения, реакцию рыбы на шумы судна, иногда форму скопления. Когда характеристика района и поведение рыбы в нем известны, часть из указанных параметров может не уточняться. Получение полного представления о косяке облегчает выбор правильного способа его облова а сокращает количество малорезультативных заметов и тралений.
С уменьшением дистанции от судна до косяка целесообразно постепенно снижать усиление и длительность зондирующего импульса, а также своевременно переходить на меньшие диапазоны самописца и электронного индикатора. Это способствует более точному определению характеристик косяка, так как при уменьшении усиления сужается полярная характеристика дальности рыболокатора и, следовательно, повышается его разрешающая способность по углу, а при сокращении длительности посылки повышается разрешающая способность аппаратуры по дистанции, что важно при оценке плотности и протяженности скопления в направлении зондирования (уменьшается также затягивание принимаемого эхо-сигнала за счет внутрикосяковой реверберации).
Особенно это относится к низкочастотным рыболокаторам, имеющим достаточно широкие характеристики направленности, которые могут приводить к весьма большим погрешностям при определении характеристик косяка. При наличии в станции высокочастотного тракта с узкой характеристикой направленности параметры скопления можно определить более точно. Оценка параметров косяка достаточно быстро и легко может быть проведена с помощью электронных индикаторов с секторной разверткой (рис. 68, в). В случае использования рыболокаторов одновременного кругового или секторного обзора такая оценка требует еще меньших затрат времени.
Успех облова во многом зависит от точности определения параметров косяка и его поведения. Одним из основных параметров, определяющих целесообразность облова скопления, является его горизонтальная протяженность l, т. е. расстояние или угол а между кромками косяка в горизонтальной плоскости (угловая протяженность косяка, зависит от расстояния D до него); l=2D·tgα/2.
При практическом использовании рыболокаторов для оценки геометрических размеров косяков по замеренным угловым параметрам и расстояниям обычно пользуются номограммами или таблицами (рис. 69).
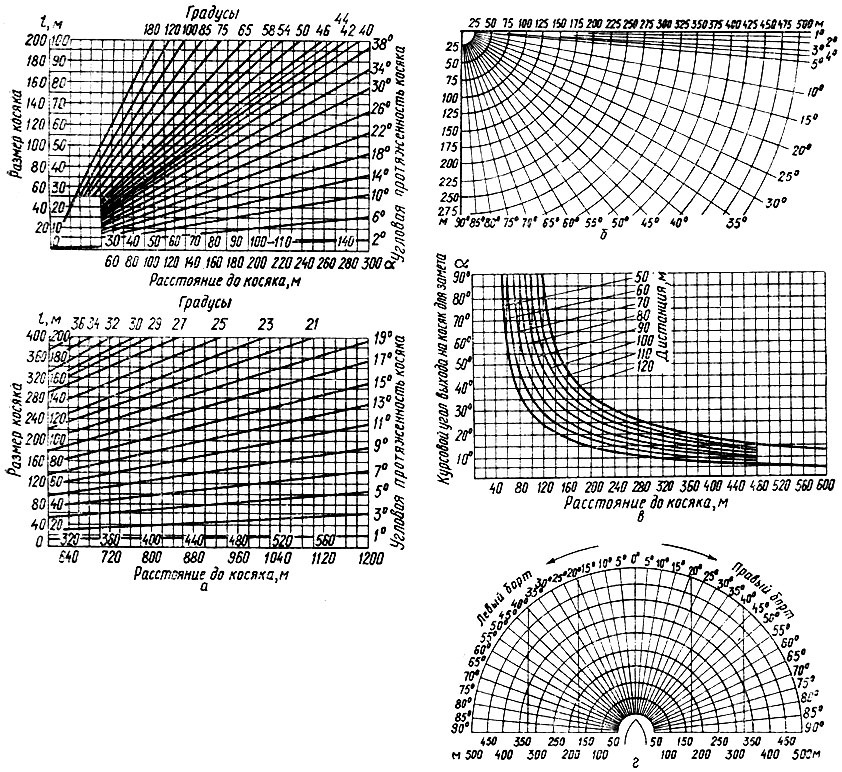
Рис. 69. Номограммы определения основных параметров косяков рыбы: а - размеров; б - глубины нахождения; в - угла выхода на косяк; г - расстояния до косяка в случае прохода судна в стороне от него
Зная горизонтальную протяженность косяка, можно быстро определить дистанцию D3, на которой может держаться судно при замете кошелькового невода вокруг него. Она равна разности между радиусами невода RH и косяка RK:
При размерах косяка, превышающих размеры невода, стараются обловить наиболее плотную часть скопления.
Протяженность косяка в направлении зондирования определяется по длительности отметок эхо-сигналов на ленте самописца или экране электронного индикатора при развороте акустической антенны от одной его кромки до другой в горизонтальной плоскости. Одновременно оценивается плотность скопления (как правило, на основе опыта оператора, учета предшествующих обловов и т. д.), а иногда и центр плотности косяка [9]. Большую помощь при этом могут оказать электронные индикаторы с амплитудной отметкой сигнала, имеющиеся в большинстве современных рыболокаторов. Скорость перемещения ленты самописца должна быть максимальной. В общем случае отсчет длины отметок эхо-сигналов целесообразно уменьшить на 25-30%, так как длительность эхо-сигналов от плотных косяков увеличивается за счет многократных отражений акустической энергии от входящих в него рыб. Для оценки плотности скопления опытные операторы эффективно используют слуховые индикаторы и достаточно четко определяют возможную плотность по характеру звучания принимаемых эхо-сигналов. Наиболее объективную оценку плотности скопления можно получить при одновременном анализе показаний всех выходных устройств станции (самописца, электронного и слухового индикаторов).
Глубина нахождения косяка также является весьма важным параметром как при кошельковом, так и при разноглубинном траловом лове. При кошельковом лове этот параметр определяет возможность облова данного косяка неводом с определенной высотой стенки, при траловом - выбор глубины траления (хотя бы предварительный). Глубина h, на которой находится обнаруженный косяк, определяется по углу наклона β акустической системы или характеристики направленности при электронном сканировании и дистанции r до него, h=rtgβ. По этой формуле получают данные для составления соответствующих таблиц или номограмм (см. рис. 69, б).
В пульты управления наиболее совершенных рыболокаторов встроены соответствующие индикаторы для определения глубины нахождения косяка.
При определении глубины нахождения косяка необходимо учитывать расстояние от антенны до поверхности воды, которое добавляют к значению, полученному по номограмме (например, для судов типа СРТМ эта величина равна 6 м, т. е. осадка судна ≈ 5 м, вылет антенны ≈ 1 м).
Определять глубину косяка, если он находится на большом расстоянии от судна, нецелесообразно из-за возможной рефракции лучей, обусловливающей получение неточных данных. На дистанциях порядка 300-600 м ошибка будет меньше. Размер косяка по вертикали можно определять с помощью номограммы (см. рис. 69, а). При определении указанных параметров, а также горизонта наиболее плотной части скопления необходимо работать при возможно меньших усилении приемного тракта, длительности импульса и узкой характеристике направленности. Более точные оценки глубины расположения косяка и его вертикальной протяженности могут быть получены при вертикальной локации. Проходить над косяком можно в тех случаях, когда известно, что рыба в нем незначительно реагирует на шумы судна, или при тралениях на достаточно больших глубинах, когда рыба, как правило, не пугается шумов движущегося судна.
При облове рыбы разноглубинным тралом в большинстве случаев необходимо выводить орудие лова на несколько метров ниже верхней кромки косяка для лова наиболее плотной его части. При этом необходимо учитывать поведение рыбы, ее реакцию на шум судна и движущийся трал.
При лове рыбы кошельковыми неводами и разноглубинными тралами во многих случаях важно знать направление и скорость перемещения косяка, особенно в первый период работы в новом районе, для получения более полной информации о поведении рыбы. Когда используется рыболокатор с однолепестковой характеристикой направленности, определение указанных параметров вызывает большие затруднения и во многом зависит от опыта оператора. При небольших скоростях движения косяков непосредственное использование эффекта Допплера в рыболокационной аппаратуре без применения дополнительных приставок практически невозможно из-за весьма малого изменения тона эхо-сигнала.
В настоящее время скорость и направление движения косяка с помощью аппаратуры с однолепестковыми характеристиками направленности определяют следующим образом. Судно подходит к косяку на расстояние 200-300 м и ложится в дрейф. Оператор с помощью рыболокационной станции наблюдает за изменением курсовых углов на правую и левую кромку косяка и расстояния до него. Вахтенный помощник наносит точки координат на планшет, определяет курс и скорость косяка, после чего в зависимости от направления ветра, течения, курса и скорости косяка выбирает точку замета. При сильном дрейфе следует удерживать судно на месте относительно воды, чтобы не было дополнительных погрешностей при оценке параметров косяка. Ряд последовательных положений косяка рыбы, нанесенных на крупномасштабный планшет, позволит определить скорость и направление его движения.
Скорость и направление движения косяка определяют также с помощью планшета, используемого судоводителями при расхождении судов. С помощью рыболокационной станции через фиксированные промежутки времени (примерно через 1 мин) определяют курсовой угол и дистанцию до косяка (два- четыре отсчета). Соответствующие точки наносят на планшет и аппроксимируют вектором, который делят на время наблюдения в минутах. Полученный вектор относительного движения переносят к концу вектора судна, который проводят на планшете из начала координат в направлении движения судна. Его длина соответствует скорости судна (в м/с). Затем из начала координат к концу вектора относительного движения проводят вектор косяка, направление которого соответствует направлению движения косяка, а его длина-скорости косяка в метрах в минуту. Для облегчения вычислений используют таблицу перевода скорости, выраженной в метрах в минуту, в скорость в узлах.
Для оперативной оценки скорости перемещения обнаруженного косяка рыбы целесообразно создание приставок к рыболокаторам горизонтального действия для измерения допплеровских сдвигов частоты отраженных сигналов от косяка. С помощью такой приставки допплеровское смещение измеряют следующим образом. После приближения к косяку судно останавливают и рыболокатором производят несколько посылок. Частота заполнения принятых эхо-сигналов сравнивается с частотой заполнения зондирующих импульсов (например, по одному импульсу за каждый период допплеровской частоты). Разностная частота с помощью формирователя преобразуется в импульсы, которые подсчитываются счетчиком в течение фиксированного промежутка времени. Количество импульсов зависит от величины допплеровского сдвига частоты, т. е. оно пропорционально относительной скорости движения косяка. Таким образом, шкала счетчика может быть проградуирована непосредственно в единицах скорости. Указанным способом можно фиксировать даже очень медленно движущиеся объекты, когда сложно выделить на слух допплеровскую разностную частоту. Наличие такой информации также облегчает классификацию и идентификацию целей.
Фирмой "Симрад" разработан другой тип допплеровской приставки - "Тагет Допплер анализер", обеспечивающей быстрое и точное определение перемещения цели и изменения ее движения. Приставка проводит анализ эхо-сигнала посредством разделения его акустического спектра на узкие полосы. Данные воспроизводятся на экране ЭЛТ с памятью. Благодаря сохранению предыдущей информации облегчается сравнение данных, что позволяет быстро обнаружить любые изменения в поведении объекта. Результаты непосредственно считываются со шкал экрана ЭЛТ индикатора устройства.
При выходе судна на курс перемещения косяка эхо-сигналы от него часто резко ослабевают или пропадают. Это происходит в том случае, когда косяк озвучивается зондирующими импульсами в направлении его движения (сзади), т. е. когда курсы судна и косяка совпадают, и особенно при регистрации быстро плавающих рыб. Отражательная способность рыб в косяке в данном случае (при озвучивании с хвоста) сильно уменьшается, что может служить косвенным признаком для определения направления движения косяка. Успех при облове такого косяка зависит от точности оценки направления и скорости его перемещения.
В случае применения рыболокационных станций одновременного кругового или секторного обзора определение параметров движения рыбы значительно облегчается и требует меньших затрат времени. Электронный индикатор фактически выполняет при этом функции планшета, так как благодаря достаточно длительному послесвечению трубки предыдущие положения косяка остаются видимыми на экране и можно легко проследить направление перемещения косяка и определить его скорость (см, рис. 27, в).
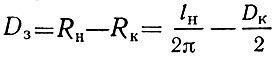
На рис. 70 представлена последовательность изображений на экране электронного индикатора рыболокатора кругового обзора LSS-30 при подходе судна к обнаруженному косяку скумбрии и обмете его кошельковым неводом. В положении, показанном на рис. 70, а, с левого борта воспроизводятся эхо-сигналы от косяка рыбы, обнаруженного на расстоянии порядка 1 км, при подходе к нему судна на расстояние 350 м. На рис. 70, б, в показано положение косяка при повороте судна перед началом замета (расстояние до косяка 220 м, направление на него 100°). Поворот судна виден по положению кильватерной струи. На рис. 70, г показано положение косяка во время кошелькования (расстояние до него примерно 150 м, направление ≈ 120°), на рис. 70, д - положение невода и движение рыбы в направлении от правого борта к носовым курсовым углам, а на рис. 70, е - обстановка в конце замета (косяк скумбрии разделился на два).
Рис. 70. Индикация эхо-сигналов на экране станции кругового обзора при кошельковом лове: 1 - косяк рыбы; 2 - кильватерная струя; 3 - невод
При оценке косяка и выборе наиболее рационального способа его облова необходимо знание реакции рыбы на шум, создаваемый судном. Если по сведениям, полученным с других промысловых судов, работающих в данном районе, или при предыдущих заметах или тралениях, установлено, что рыба не распугивается проходящим над ней судном, то можно получить более точные данные о параметрах косяка, пройдя над ним двумя перпендикулярными галсами. Если рыба резко реагирует на шум, создаваемый судном (опускается на глубину, рассеивается или резко меняет направление своего движения), проходить над косяками или очень близко подходить к ним не следует (параметры косяка нужно определять на дистанции 200-300 м).
В некоторых случаях при кошельковом лове возникает необходимость определения угла выхода -судна на косяк в начале замета. Величину его можно определить исходя из расстояния до косяка перед выходом на замет и заданного расстояния до него в начале замета с помощью графика (см. рис. 69, б), на одной оси которого нанесены расстояния до левой кромки косяка, на другой - курсовые углы выхода на косяк. Кривые на графике рассчитаны для расстояний до косяка в начале замета от 50 до 120 м.
После определения основных параметров косяка и его поведения, направления ветра и течения (если оно имеется в данном районе) проводится необходимое маневрирование судна и последующий облов рыбы.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'