Автоматизированные системы обработки и отображения информации для кошелькового лова
Автоматизированная система обработки информации, получаемой с помощью судовых радиоэлектронных приборов, и наглядного воспроизведения на экране электронного индикатора всей ситуации лова в процессе кошелькования разработана норвежской фирмой "Симрад" [84, 86]. Опытный образец системы "Сонар Дейте Дисплей" позволяет отображать на экране индикатора размером 254×193 мм весь процесс кошелькования, включая положение маркерного буя, направление движения и относительное перемещение судна и косяка рыбы. Для воспроизведения на электронном экране индикатора всей ситуации лова в наиболее наглядном виде данные от панорамного рыболокатора, гирокомпаса и допплеровского гидроакустического лага обрабатываются электронно-вычислительной машиной и затем подаются на индикатор-планшет с частотой повторения 30 Гц для получения немелькающего изображения при дискретной информации от рыболокатора. На экране индикатора отображается ситуация лова за последние б мин работы системы (погрешность аппаратуры "Сонар Дейте Дисплей" не превышает 40-50 м после 5-10 мин работы системы).
Основным информационным звеном комплекса является рыболокатор одновременного секторного обзора с электронным сканированием, обеспечивающий быстрое получение данных о дистанциях до косяков рыбы и курсовых углах на них. Акустическая система рыболокатора состоит из 121 (11×11) магнитострикционного никелевого преобразователя и обеспечивает озвучивание сектора обзора 60°×6° посредством последовательного излучения (дискретного электронного сканирования в излучении) импульсов длительностью от 3 до 10 мс в 10 направлениях характеристикой направленности 6°×6° и прием отраженных сигналов с помощью веера статических характеристик. За одно зондирование проводится одновременный просмотр подводной обстановки в пределах всего сектора 60°×6°. Акустическая антенна размещена в обтекателе, стабилизирована (исключается влияние бортовой и килевой качки судна) и может разворачиваться в горизонтальной плоскости на угол 360° и наклоняться в вертикальной до 20° вверх и до 110° вниз. Предусмотрена возможность изменения горизонтального положения 60°-ного сектора на вертикальное. Система стабилизации (от гировертикали) позволяет удерживать заданное положение антенны с погрешностью до 1° при качке от 0 до 40°. Рыболокатор работает на частоте 38 кГц и имеет дальность обнаружения небольших косяков рыбы (с силой цели, равной минус 15 дБ) около 500 м (расчетная дальность действия по косяку с силой цели - 15 дБ при пороге обнаружения 10 дБ и скорости судна 15 уз составляет около 1000 м). Длительность одного цикла работы равна 0,667 с. Временной интервал между посылками может контролироваться электронно-вычислительной машиной (в указанном случае составляет около 1 с).
Предусмотрены три режима работы рыболокатора (автоматический шаговый поиск "Авто степ", автоматическое слежение "Авто трек" и ручное сопровождение "Мэньюал"). При работе в первом режиме акустическая антенна автоматически поворачивается на 60° после каждого зондирования - озвучивания сектора, при этом за несколько посылок перекрывается все водное пространство вокруг судна, за исключением небольшой зоны в области кормы, где наблюдение затруднено из-за помех от кильватерной струи и гребного винта. Эхо-сигналы, принимаемые за период одного секторно-шагового сканирования, одновременно воспроизводятся на электронном индикаторе-планшете. Наклон антенны проводится посредством ручного управления. При работе во втором режиме веер характеристик рыболокатора устанавливается в направлении на выбранную цель (косяк рыбы). Затем оператор включает режим автоматического слежения, и акустическая антенна, управляемая ЭВМ, автоматически поворачивается в сторону движения цели, постоянно удерживая ее в секторе одновременного обзора 60°. Наклон антенны также регулируется автоматически. В третьем режиме работы оператор проводит слежение за целью вручную, примерно так же, как при использовании обычных рыболокаторов, однако в данном случае работа оператора существенно облегчается благодаря большому сектору одновременного обзора и электронному сканированию в этом секторе.
Для обработки информации, поступающей от панорамного рыболокатора и навигационных приборов, и выдачи данных для воспроизведения на электронном индикаторе-планшете, в комплексе используется ЭВМ "НОРД I" с объемом памяти 16 000 слов, способная также вырабатывать сигналы для управления работой рыболокатора. В состав ЭВМ входят аналого-цифровые, цифро-аналоговые преобразователи и синхронизирующие устройства.
Испытания в промысловых условиях на судах НИС "Р/В "Симрад" и кошельковом сейнере "М/С Хардрон" подтвердили высокую эффективность аппаратуры. С помощью такого комплекса судоводитель может в процессе облова косяка на одном экране индикатора-планшета постоянно видеть движение судна, косяка рыбы и невода, а также их взаимное расположение.
Мощность рыболокатора в импульсе равна 3 кВт, шкалы индикации планшета - 2000×1600, 1000×800, 500×400 и 250×200 м.
Антенна рыболокатора размещена в обтекателе, выдвигающемся за отводы судна на 750 мм и обеспечивающем работу аппаратуры при скорости судна до 20 уз. Высота ПВУ порядка 3000 мм, ширина 845 мм, масса примерно 3000 кг.
Аппаратура может быть использована также для наблюдения за рыбными скоплениями при изучении их поведения и распределения, при исследованиях миграций косяков и т. д.
На рис. 81, а показано изображение подводной обстановки на экране индикатора системы "Сонар Дейте Дисплей" при кошельковании. Линия, идущая от косяка рыбы, показанного в центре экрана, влево, показывает направление движения косяка, а длина ее определяет его скорость. Размер косяка характеризуется пространством, занимаемым параллельными отметками разной длины в виде отрезков линий. Судно 1 показано символом в правой части экрана, его траектория 2 во время замета - сплошной линией. Квадратиком в нижней части экрана обозначено начало замета (буй). На экране изображена ситуация лова в данный момент и предшествующие 6 мин, т. е. практически весь процесс замета. Судно движется к маркерному бую и находится вблизи его. На рис. 81,6 дано изображение движения судна на экране системы при выключенном рыболокаторе (диапазон изображения 500×400 м). Изображение на рис. 109, в получено при работе рыболокатора в режиме "Авто степ" (рис. 81, в), несколько наклоненном веере его характеристик и диапазоне воспроизведения 500×400 м. Вначале на индикаторе воспроизводится изображение косяка 5, затем в широкой зоне фиксируются эхо-сигналы от дна 6. Кильватерная струя 7 собственного судна при его маневрировании легко различается на экране, так как эхо-сигналы от нее воспроизводятся на линии траектории судна (рис. 81, г). Это изображение получено при режиме работы рыболокатора "Мэньюал". Линия 8 показывает направление на косяк.
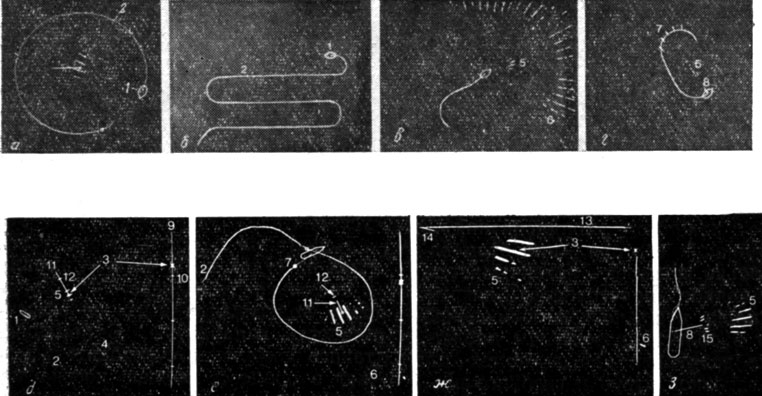
Рис. 81. Изображение подводной обстановки на панорамном индикаторе-планшете аппаратуры 'Сонар Дейте Дисплей'
Система "Сонар Дейте Дисплей" обеспечивает возможность наблюдения за движением скопления рыбы с изображением траектории его перемещения непосредственно на экране индикатора. Траектории судна и косяка воспроизводятся за последние 6 мин работы системы. На рис. 81, д показан косяк, перемещающийся на северо-запад по траектории 4 со скоростью 15 уз. Для облегчения анализа обстановки изображение на экране ориентировано относительно географических ординат. На краю экрана воспроизводится шкала глубин 10 с масштабными метками по 50 м. Вдоль линии направления движения косяка 11 наносятся метки 12 его скорости (через 1 уз). В данном примере косяк движется со скоростью 1,5 уз, а центр косяка 3 находится на глубине 40 м. Положение косяка по глубине отмечается на шкале глубин символом + (рыболокатор работает в режиме "Авто трек", диапазон индикации 1000×800 м). На рис. 81, е изображен выход судна в точку замета и далее процесс кошелькования в режиме "Авто трек" при диапазоне индикации 500×400 м. Косяк в данном случае двигался со скоростью менее 1 уз, поэтому отметка скорости 12 находится дальше линии 11, показывающей направление его перемещения. Конец невода показан точкой 7. Косяк находится на глубине несколько более 50 м. В правом нижнем углу экрана видны эхо-сигналы от дна 6.
В системе "Сонар Дейте Дисплей" предусмотрена возможность получения вертикальных разрезов косяка или скопления, когда сектор 60° переключается из горизонтального положения в вертикальное (рис. 81, ж).
Горизонтальная линия 13 у верхнего края экрана в этом случае обозначает поверхность воды, вертикальная, как и в предыдущем случае, - шкалу глубин. Кроме того, на экране указываются положение судна и угол наклона акустической системы 14. Центр косяка 3 находится на глубине 25 м (диапазон индикации 250×200 м, рыболокатор работает в режиме "Авто трек"). На рис. 81, з изображено поведение косяка рыбы и изменение его формы в дрейфе судна при диапазоне индикации 250×200 м, работе рыболокатора в режиме "Мэньюал" и воспроизведении в горизонтальной плоскости. Вблизи судна видны эхо-сигналы от слоя воздушных пузырьков 15, создаваемых при работе носового подруливающего устройства.
Промышленный вариант автоматизированной системы обработки информации и воспроизведения ситуации при поиске и кошельковании косяка рыбы на электронном индикаторе-планшете СД "Симрад Сонар Ситуэйшен Дисплей" выпускается с 1975 г.
С помощью электронно-вычислительного устройства определяются и посредством простых символов показываются на экране индикатора скорость и направление движения косяка.
Оценка скорости и направления движения косяка обычным способом требуют больших затрат времени и усиленной концентрации внимания оператора, особенно если используется станция с однолепестковой характеристикой направленности. Даже достаточно опытный оператор определяет скорость очень приближенно.
Особенностью системы СД "Симрад Сонар Ситуэйшен Дисплей" является возможность воспроизведения траектории судна в режиме истинного движения, что существенно облегчает работу судоводителя в случае кошелькования при плохой видимости, ночью и в тумане. Ориентируясь по изображению движения судна на экране-планшете, судоводитель не испытывает трудностей при выходе к бую в конце замета. Предусмотрены варианты пультового и стоечного конструктивного исполнения аппаратуры. Укрупненная блок-схема этой системы показана на рис. 82, а. Она состоит из небольшой электронно-вычислительной машины, электронного индикатора-планшета ситуаций, рыболокатора, лага и компаса, данные от которых обрабатываются ЭВМ и воспроизводятся в наглядной форме на индикаторе ситуаций. В связи с тем, что на многих судах уже имеется аппаратура, обеспечивающая получение информации для работы комплекса, он проектировался с учетом возможности подключения к нему существующих приборов. Так, в качестве датчика скорости может использоваться допплеровский гидроакустический лаг, электромагнитный лаг или лаг, основанный на механическом датчике, например трубке ПИТО и др. В качестве датчика курса целесообразно использовать гирокомпас, имеющий соответствующий электрический выход данных о направлении движения судна, однако могут применяться и некоторые магнитные компасы с электрическим выходом показаний.
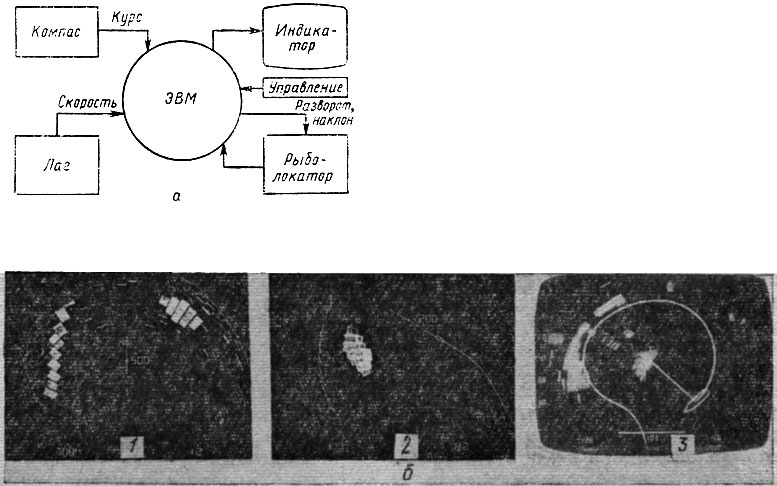
Рис. 82 Упрощенная блок-схема системы 'СД Симрад сонар ситуацион' (а) и изображение ситуаций на электронном индикаторе (б)
При использовании подобной системы оператору-судоводителю не нужно тратить время на то, чтобы представить себе ситуацию, основываясь на показаниях нескольких индикаторов, а достаточно посмотреть на один экран индикатора, на котором эта ситуация уже воспроизведена (больше внимания уделяется управлению судном и работе орудия лова).
Система имеет три режима работы (рис. 82, б): относительного движения 1, истинного движения 2 и истинного движения с автослежением 3. Режим относительного движения является поисковым. Символ, обозначающий судно, фиксируется в центре экрана индикатора ситуаций или может быть смещен к краю для расширения зоны обзора. Обзор рыболокатором проводится в режиме автоматического поиска, т. е. при автоматическом развороте антенны. Эхо-сигналы, принятые рыболокатором, воспроизводятся в соответствующих положениях относительно судна, по углу и дистанции (см. рис. 82, б, 1). Светлые отметки в правой части экрана обозначают косяк рыбы, светлая полоса в левой части экрана - кильватерную струю другого судна, отдельные тонкие линии, случайно разбросанные по экрану, - помехи и реверберация. Все эхо-сигналы, принятые за цикл последовательного обзора от одного борта к носу и от другого борта к носу судна, запоминаются в электронно-вычислительном блоке и затем воспроизводятся с большой частотой повторения для получения немелькающего изображения на экране. При движении судна следующие друг за другом эхо-сигналы при последующих циклах обзора смещаются к нижней части экрана. Подобный способ можно считать одним из вариантов получения одновременного обзора подводной обстановки в рыболокационной аппаратуре.
Две цифры в нижней части экрана указывают курс судна в градусах относительно истинного норда и скорость судна в узлах. Шкала индикации воспроизводится в виде линии, выходящей из символа судна в центре экрана. Число, воспроизводимое рядом с этой линией, означает дистанцию в метрах. Пунктирная кривая на краю экрана указывает границы диапазона действия рыболокатора.
Во втором режиме система обеспечивает воспроизведение ситуации в истинном движении. Символ судна в этом случае перемещается по экрану в соответствии с движением судна (см. рис. 82, б, 2). Кроме того, в этом случае также воспроизводится траектория судна за последние 10 мин. Как и в режиме относительного движения, шкала индикации изображается прямой линией, проходящей от символа судна в направлении курса с цифрой рядом с ней (в метрах). Ломаная кривая с левой стороны экрана указывает границы диапазона и, следовательно, перекрываемую рыболокатором зону. В этом режиме может быть осуществлена привязка изображения к истинному норду (при связи с гирокомпасом).
Третий режим - это режим истинного движения с автоматическим слежением, режим лова. ЭВМ обеспечивает автоматическое слежение за предварительно выбранным оператором косяком рыбы (влияние качки может учитываться в программе работы ЭВМ для учета возникающих колебаний акустической системы или характеристики направленности при автоматическом удержании эхо-контакта с косяком). Сопровождение проводится путем постоянного последовательного перемещения характеристики по скоплению в горизонтальной и вертикальной плоскостях. При уменьшении амплитуды эхо-сигналов ниже заданного уровня происходит автоматическое переключение направления разворота или наклона антенны [22].
В режиме слежения используются два временных строба. При их выборе в основном учитываются следующие граничные условия. Строб должен быть достаточно большим, чтобы полностью перекрывать цель, и в то же время достаточно малым, чтобы ЭВМ не "потеряла" эхо-контакта с выбранной целью и не "захватила" другой вблизи расположенный объект. Исходя из этого, в аппаратуре предусмотрены стробы, соответствующие расстояниям ±12,5 и ±25 м. Малый строб предназначен для работы с компактными скоплениями (достаточно плотными косяками) и при недостаточно благоприятных условиях для работы рыболокатора (когда присутствует большое число эхо-сигналов от кильватерных струй, дна, интенсивная реверберация и т. д.). Больший строб может использоваться в случае более разреженных скоплений и при благоприятных условиях для работы рыболокатора.
В режиме слежения ЭВМ управляет разворотом антенны в горизонтальной плоскости (угол наклона в первом варианте работы устанавливается вручную, во втором варианте также управляется ЭВМ). После первого трехкратного прохода характеристики направленности по косяку ЭВМ рассчитывается центр плотности цели, указываемый на экране символом в виде круга. Новый центр плотности рассчитывается после каждого разворота антенны и по его смещению определяются курс и скорость косяка - цели. Перемещение цели, т. е. смещение ее центра плотности, изображается на экране тонкой линией. Характеристика направленности поворачивается от центра плотности цели вначале в одну сторону примерно по 5° за цикл лоцирования до тех пор, пока уровень эхо-сигнала не снижается до 1/4 максимального значения, затем направление разворота меняется на обратное и т. д. (максимальный угол разворота задан равным 45° в каждую сторону от центра плотности скопления).
В варианте работы с управлением наклоном антенны ЭВМ осуществляется попеременное сканирование антенны в горизонтальной и вертикальной плоскостях, т. е. после каждого поворота характеристики проводится автоматическое изменение ее наклона ступенями по 2° в пределах от 15 до 90° (при работе аппаратуры на близких дистанциях и средних условиях для работы рыболокатора). Верхний предел наклона (-15°) в данном случае установлен для предотвращения появления мешающих сигналов от кильватерных струй, поверхностной реверберации и др. При благоприятных условиях для работы рыболокатора может использоваться режим с пределами наклона от -5 до -90°.
Результат оценки ЭВМ скорости косяка и направления его перемещения отображается на экране индикатора в виде вектора из центра плотности косяка (см. рис. 82, б, 3). Длина его соответствует скорости косяка, а направление - направлению движения косяка. На линии наносятся метки в единицах скорости (одна метка равна 1 уз).
С левой стороны экрана указывается шкала глубин.
Глубина косяка, его вертикальная протяженность и концентрация изображаются в виде горизонтальных линий (слева на экране), причем длина линий соответствует плотности косяка на данной глубине. Глубина нахождения скопления определяется по данным угла наклона антенны рыболокатора и дистанции. Прямоугольник - символ маркерного буя, который в соответствующий момент высвечивается оператором, чтобы определить положение, где началась отдача невода, что также облегчает поиск и обнаружение буя в случае плохой видимости (в тумане, ночью и т. д.).
Линия из центра символа судна указывает направление на центр косяка, а длина ее соответствует дистанции до него. Цифровое значение расстояния до косяка в данный момент воспроизводится в середине нижней части экрана. При работе системы во втором и третьем режимах может запоминаться положение обнаруженных косяков. Для этого оператор выводит треугольный символ в место изображения обнаруженного косяка и продолжает поиск других скоплений. В блоке памяти системы могут одновременно храниться данные о положении четырех косяков, благодаря чему после облова одного косяка судно может вернуться к одному из других, ранее обнаруженных скоплений. На рис. 82, б, 3 видны треугольные символы еще на двух изображениях эхо-сигналов от косяков.
Для уменьшения влияния помех от гребного винта и рыболокаторов, установленных на соседних судах, использована техника, подобная примененной в рыболокаторе ST с накоплением информации, введенная в электронно-вычислительный блок [22, 25].
Как можно видеть из рассмотрения системы CD, представляемые на электронном планшете обработанные ЭВМ сведения от средств промысловой гидроакустики и навигации непрерывно обеспечивают оператора-судоводителя практически всей необходимой информацией для принятия объективных и обоснованных решений в процессе всего кошелькования. Благодаря кратковременности процесса замета обеспечивается возможность представления на индикаторе достаточно наглядного воспроизведения непосредственно всего процесса облова косяка от отдачи маркерного буя до конца замета. Тем самым значительно облегчается работа оператора, а вероятность пролова из-за недостаточно оперативной оценки им многочисленных данных, получаемых обычно отдельно, и принятия необоснованного решения в процессе кошелькования существенно уменьшается. Для оптимизации лова в данном случае судоводителю требуются получение с ЭВМ рекомендованных курсов и сведения о положении нижней подборы невода, так как скорость и глубина погружения подборы невода могут изменяться вследствие возможных течений и других факторов (это может влиять на конечный результат замета).
В настоящее время имеются достаточно эффективные телеметрические измерители положения нижней подборы невода с гидроакустической линией связи в нескольких точках подборы [28], которые при применении стационарно устанавливаемой в корпусе судна приемной акустической антенны (например, на выдвижном устройстве) могут обеспечить получение указанной информации также и в процессе кошелькования. Такие телеметры довольно широко используются японскими рыбаками.
Вместо рыболокаторов с однолепестковыми характеристиками направленности целесообразно применение станций одновременного обзора, имеющих большую скорость получения информации о косяке. Местонахождение обнаруженных косяков может запоминаться ЭВМ по данным от радионавигационных систем.
При необходимости информация, воспроизводимая на электронном планшете, может использоваться для выработки управляющих воздействий исполнительным механизмам управления кошелькованием (заметом) без участия человека.
Система отображения ситуации лова с использованием рыболокаторов одновременного кругового и секторного обзора типа FSS-32B, 40Б, 45Б, 75Б и др. реализована фирмой "Фуруно" посредством введения в аппаратуру блока СД-102Р (или СДП-102Р) для получения немелькающего изображения на экране (диаметром 25,4 мм) индикаторов станций принятых эхо-сигналов (путем запоминания и последующего многократного воспроизведения информации с частотой 50-60 Гц) и приставки ТМ-102 для получения изображения в режиме истинного движения (при связи с гирокомпасом и лагом).
На экране индикатора рыболокатора при этом воспроизводятся траектория судна за последние 15 мин его хода с вектором направления его движения, а также косяки рыбы и их перемещение с вектором направления движения скопления. Дистанция до скопления, его глубина нахождения, скорость перемещения и скорость судна указываются на цифровых индикаторах. Изображение может быть стабилизировано относительно норда и направления движения судна.
Благодаря использованию станций одновременного панорамного обзора для получения подводной информации обеспечивается более качественное воспроизведение эхо-сигналов от обнаруженных скоплений, более быстрая оценка их параметров и скорости перемещения (путем оценки смещения косяка за выбранный промежуток времени) по сравнению с комплексами, имеющими рыболокаторы последовательного обзора с однолепестковыми характеристиками направленности. Тем самым облегчается работа оператора при облове быстродвижущихся объектов.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'