Применение гидроакустической аппаратуры в системах автоматизации тралового и других видов лова
Система по построению и принципу работы, подобная описанной выше, разрабатывается фирмой "Симрад" для использования на траловом разноглубинном лове. Экспериментальный комбинированный промыслово-гидроакустический навигационный комплекс "Интегрей Дейте Дисплей" обеспечивает автоматическую обработку данных, полученных с помощью средств промысловой гидроакустики и навигационных приборов, и воспроизведение обработанной информации на электронном индикаторе-планшете в удобном для восприятия виде [27, 47,64,87].
Система для тралового лова включает значительно больше приборов и аппаратуры, чем система, описанная выше. Она состоит из двух рыболокаторов горизонтального и вертикального действия, двух ЭВМ, электронного индикатора-планшета, приставки к приемо-индикатору системы дальней радионавигации "Лоран-С", лага, гирокомпаса, гировертикали, многоканального тралового зонда с датчиками эхолотного типа, устройства для определения положения трала относительно судна, термозонда и четырехпозиционного прибора определения степени наполнения кутка трала рыбой контактного типа.
Подводная траловая гидролокационная система включает семь акустических преобразователей с предварительными усилителями. Один преобразователь с рабочей частотой 100 кГц используется для зондирования обстановки над тралом, пять преобразователей с рабочей частотой 190 кГц служат для просмотра обстановки в различных направлениях поперечного сечения трала, и один преобразователь с рабочей частотой 20 кГц входит в качестве составного элемента в устройство для определения направления "судно - трал" (рис. 83, а). Указанная система имеет заряжаемый источник питания на 2 сут непрерывной работы и соединяется обычным одножильным кабелем с судовой лебедкой тралового зонда. Седьмой преобразователь направлен в сторону судна и несколько раз в минуту излучает импульсы, которые принимаются бортовой акустической антенной, состоящей из четырех отдельных преобразователей. Принятые сигналы усиливаются предварительными усилителями и поступают на цифровую схему сравнения фаз. Разность фаз принятых сигналов от датчика на трале определяется положением трала относительно судна. В другом варианте исполнения этого узла прием сигналов от седьмого преобразователя периодически (при развороте антенны в корму) осуществляется рыболокатором моноимпульсного типа, позволяющим получать более высокую точность определения углового положения трала относительно судна (с погрешностью 1°) по сравнению с рыболокатором обычного типа. Этот рыболокатор также обеспечивает поиск рыбных скоплений впереди судна. Вся информация, принимаемая с трала и поступающая от вышеуказанной бортовой аппаратуры, обрабатывается ЭВМ "Норд-10" и затем отображается на четырехцветном индикаторе ситуаций, управляемом мини-ЭВМ.
В данном экспериментальном комплексе предусмотрено четыре режима индикации на электронном индикаторе: изображение обстановки системы трал - судно в вертикальной плоскости вдоль линии трал - судно (продольный разрез по вертикали), в горизонтальной плоскости (вид сверху) и в поперечном сечении судна и трала (см. рис. 83, б, в, г, д). При любом режиме воспроизведения в верхней части экрана слева направо оранжевым цветом индицируются данные о скорости судна и его курсе, угловом положении трала относительно судна, его наполнении, температуре в месте нахождения трала и географических координатах судна. Символы судна и трала в соответствии с их относительным положением вместе с цифрами глубины хода трала, вертикального раскрытия, отстояния трала от грунта, глубины места, масштабов индикации, расстояния между тралом и судном по горизонтали воспроизводятся красным цветом, эхо-сигналы - зеленым цветом.
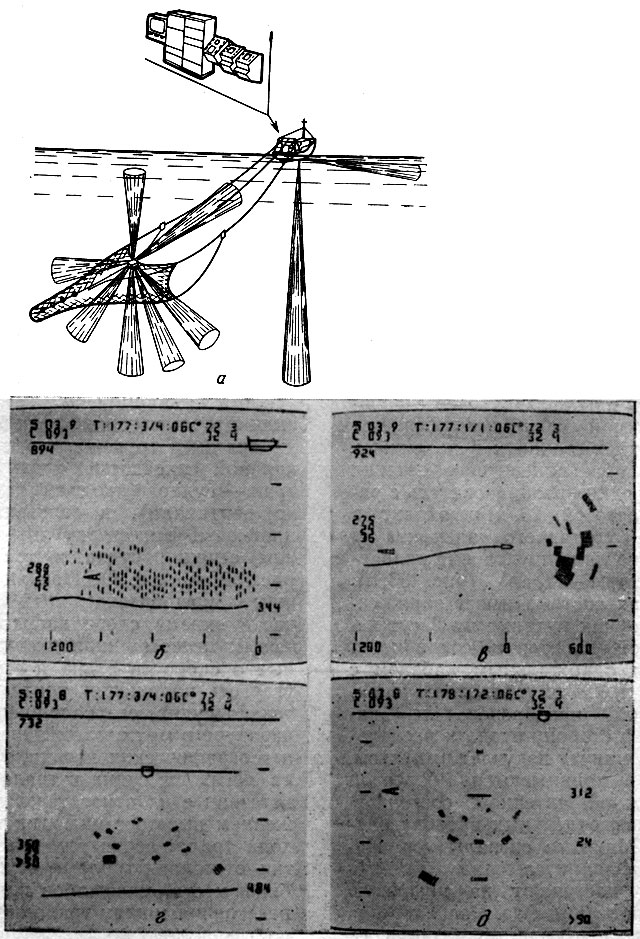
Рис. 83. Общий вид (а), изображение подводной обстановки в зоне трала (б), вид сверху (в), в поперечном сечении судна (г) и трала (д) в аппаратуре для тралового лова
В первом режиме символ судна показывается в правом верхнем углу экрана, символ трала изображается в правильном положении относительно поверхности воды, дна и судна. Степень наполнения кутка трала указывается вертикальными: линиями поперек символа трала. На экране также представляются эхо-сигналы бортового рыболокатора вертикального действия, которые перемещаются влево в соответствии с движением судна. Ниже показан контур дна, справа приведена шкала глубин, внизу-расстояние по горизонтали. Вид сверху воспроизводит положения трала и судна относительно друг друга, траекторию хода судна с тралом за выбранный промежуток времени (10-20 мин и более), а также информацию от рыболокатора горизонтального действия, если он работает в режиме поиска (в одном масштабе). Указанная информация облегчает выполнение маневрирования судна при тралении, так как оператор может непосредственно видеть на экране траекторию движения трала.
При третьем режиме воспроизводятся эхо-сигналы рыболокатора, положение трала относительно судна в плоскости, перпендикулярной курсу судна, контуры дна и т. д. В четвертом режиме индикации в виде светящихся секторов воспроизводятся эхо-сигналы от траловых акустических преобразователей, положения верхней и нижней подбор, форма устья трала, положение дна, а также рыбы в районе трала (в поперечном сечении).
Как указывалось ранее, большая инерционность тралов часто затрудняет своевременный вывод их на другой горизонт при изменении глубины нахождения косяка. Повышению скорости перемещения трала по вертикали при необходимости изменить глубину его хода также помогают средства промысловой гидроакустики - гидроакустическая аппаратура телеуправления работой распорных траловых средств - траловых досок. Управление положением трала в вертикальной плоскости обычно осуществляется изменением скорости судна или длины вытравленных ваеров. Оперативно уменьшать глубину трала не всегда удается, особенно когда нет большого резерва мощности двигателя и траловой лебедки. В обоих случаях управление тралом связано с существенными энергетическими затратами (что снижает эксплуатационные показатели судна) и отрицательно сказывается на нормальном функционировании силовой судовой установки и траловой лебедки (частое периодическое включение, изменение режимов снижает срок службы механизмов, общую надежность их работы, приводит к преждевременному износу элементов и т. д.).
Изменение положения трала по вертикали, осуществляемое посредством дистанционного управления с борта судна работой распорных траловых досок, не требует больших энергетических затрат, не связано с изменениями режимов лебедки и в то же время обеспечивает высокую эффективность работы. Как показали испытания подобной системы, таким способом трал можно поднять на 30 м вверх в течение приблизительно 1 мин. Обычными методами достигнуть этого практически невозможно, так как для поднятия трала необходимо снизить скорость судна, что приводит к некоторому опусканию трала, при этом продолжительность выхода его на меньшую глубину обычно увеличивается в несколько раз. Управление распорными досками осуществляется с борта судна устройством телеуправления по гидроакустической линии связи посредством передачи кодированных сигналов. Приемная подводная часть устройства выделяет сигнал управления и передает команду на исполнительные механизмы.
Разрабатываются автоматизированные системы и для донного тралового лова [25, 29, 58]. Основными источниками информации в таких системах являются рыболокатор вертикального действия и телеметрический измеритель вертикального раскрытия трала. Система предназначена для облова косяков донных рыб, высота которых больше нормальной величины вертикального раскрытия орудия лова.
Принцип действия системы состоит в следующем. Данные телеметрического измерителя вертикального раскрытия подаются на борт судна по гидроакустической линии связи и сравниваются с вертикальным размером косяка, зарегистрированного рыболокатором вертикального действия. Если вертикальное раскрытие трала меньше размера косяка по вертикали, то электронным устройством вырабатываются управляющие напряжения, которые воздействуют на исполнительные механизмы, автоматически изменяющие шаг гребного винта или обороты двигателя. Это приводит к соответствующему увеличению вертикального раскрытия трала, обеспечивающему полный захват косяка.
Через определенный промежуток времени величина вертикального раскрытия автоматически возвращается к прежнему значению до появления следующего косяка большой протяженности по вертикали. Благодаря такой системе подобные косяки могут облавливаться сравнительно небольшими донными тралами, т. е. при меньших энергетических затратах.
Основными источниками информации простейшей системы автоматизации разноглубинного траления (в вертикальной плоскости) являются рыболокатор вертикального действия и телеметрический измеритель глубины хода трала. В данной системе также постоянно сравниваются показания о глубине нахождения рыбы (полученные рыболокатором) и горизонте хода трала. Получаемое управляющее напряжение (сигнал ошибки) используется для управления траловой лебедкой или изменения шага гребного винта. Оно может служить для включения и выключения устройства телеуправления распорными траловыми досками. При равенстве показаний о глубине нахождения и горизонте хода трала сигнал ошибки будет равен нулю и система будет находиться в положении равновесия.
Подобный принцип действия имеют и другие системы, например система для лова кальмаров крючковой снастью (по данным о глубине скопления кальмара, полученным с помощью рыболокатора вертикального действия, лебедки автоматически опускают снасти на нужный горизонт), для автоматизации тралового лова тунцов и др. [24, 58].
Проводятся работы по созданию более сложных, комплексных систем автоматизации процессов разноглубинного прицельного тралового лова, в которых по данным от гидроакустических рыболокационных приборов и телеметрической аппаратуры контроля параметров трала и обстановки в зоне его действия решается задача встречи трала с косяком. Средства промысловой гидроакустики в таких системах предназначаются для автоматического обследования заданного объема водной среды с распознаванием целей и объектов; статистической обработки эхо-сигналов от косяков и скоплений рыбы, дна и других объектов в вертикальной и горизонтальной плоскостях; автоматического слежения за обнаруженным скоплением в процессе маневрирования судна и наведения трала на скопление с автоматическим контролем параметров трала в процессе траления и т. д.
В таких системах при решении задачи встречи трала с косяком в качестве устройств отображения подводной обстановки целесообразно использовать электронные индикаторы наведения на ЭЛТ с большими экранами. На их экранах могут одновременно высвечиваться подводная обстановка по данным гидроакустической рыболокационной аппаратуры и телеметрических приборов контроля, положение косяков и трала, определяться элементы движения косяка и его параметры и др. По показаниям такого индикатора-планшета может проводиться необходимое маневрирование судна для наведения трала на косяк.
При разноглубинном прицельном траловом лове значительно увеличиваются информационные потоки. Продолжительность процесса лова в общем случае значительно большая, чем при кошельковом промысле, что усложняет обеспечение наглядности воспроизведения информации. В данном случае сложно обеспечить отображение, например, на электронном индикаторе всего процесса прицельного траления (за исключением процесса траления одного косяка или небольшого числа косяков, когда длительность траления может быть небольшой). Кроме того, если в случае кошелькового промысла процесс облова можно достаточно наглядно представить при изображении его только в горизонтальной плоскости, то при тралении в общем случае проводится управление положением трала по глубине и по горизонту, а это затрудняет решение задачи наглядного и удобного для восприятия воспроизведения процесса траления. Это можно видеть, например, на рис. 83, в, г (большое количество цифровых данных на экране и недостаточно наглядное изображение всего процесса лова). Вероятно, в данном случае целесообразно идти по пути разнопланового или разномасштабного отображения ситуации моментов траления с более крупномасштабным изображением на общем плане лишь обстановки в зоне рыболокатора вертикального действия, в районе нахождения косяка рыбы и в зоне трала при подходе к данному скоплению.
В случае последовательного траления ряда косяков отображение подводной обстановки и поведения рыбы еще более усложняется, особенно при облове достаточно подвижных и реагирующих на трал скоплений рыбы, так как для успешного облова таких косяков важен своевременный и объективный учет их поведения при прохождении над ними судна, подходе к ним трала и в районе трала. В настоящее время эти данные судоводитель может получить при синхронном наблюдении за показаниями рыболокатора вертикального действия и тралового зонда в течение определенного, иногда продолжительного промежутка времени. Так как указанная информация фиксируется на регистраторах-самописцах этих приборов, являющихся накопителями информации, т. е. своего рода блоками памяти с одновременным наглядным ее отображением, то анализировать имеющиеся показания достаточно удобно. Совместить все это на одном планшете трудно (и, по-видимому, даже нецелесообразно), так как наглядность и удобство восприятия обстановки и данных о поведении рыбы при облове, важных для оператора, при этом вряд ли улучшатся. Удобнее фиксировать показания обоих приборов на одной ленте самописца или панорамном индикаторе, видимо, с учетом разного пространственного положения аппаратуры при тралении. Остальные необходимые для облова данные могут воспроизводиться, к примеру, на другом, рядом стоящем индикаторе или на этой же ленте.
Осуществление автоматического поиска скоплений не вызывает затруднений, так как такие программы предусмотрены во всех рыболокаторах горизонтального действия при обеспечении оператором необходимой регулировки органов управления в конкретных условиях и районах работы судна. Распознавание, оценка и выбор косяка или скопления в настоящее время проводятся только оператором на основе анализа и расшифровки показаний. Автоматических устройств для решений указанной задачи пока нет. В зависимости от условий промысла, состояния сырьевой базы, количества скоплений и косяков в данном районе и других факторов даже одинаковые по величине косяки в одном случае считаются пригодными для облова, а в других случаях, например при наличии больших скоплений, - непригодными, что зависит также от их поведения, биологического состояния и т. д. В связи с этим окончательное решение по выбору косяка для облова, по-видимому, даже при наличии эффективной автоматизированной системы будет оставаться за оператором-судоводителем.
После выбора объекта лова рыболокатор горизонтального действия переводится в режим автоматического сопровождения, или слежения, за косяком по дальности и направлению при маневрировании судна для выхода в точку начала траления. С помощью рыболокатора горизонтального действия при этом проводятся последовательная оценка глубины нахождения косяка для обеспечения своевременного вывода трала на данный или близкий горизонт в нужный момент времени, а также определение направления его движения и скорости. Указанная задача подобна задаче, решаемой при кошельковом лове, и, как было показано, автоматизация этого процесса может полностью обеспечиваться (т. е. при этом не требуется участия оператора, например в комплексе СД).
После отдачи трала судно приближается к косяку. С помощью рыболокатора горизонтального действия, так же как и при слежении, будут проводиться автоматическое определение дистанции и уточнение глубины его нахождения, так как при сближении ошибка за счет рефракции лучей уменьшается. В это время целесообразна выдача данных о направлении на центр плотности косяка или скопления при достаточно большой протяженности их в горизонтальной и вертикальной плоскостях. Одновременно телеметрическая аппаратура обеспечивает получение данных о параметрах трала, например о глубине хода (или отстоянии его от дна), их вертикальном раскрытии. Так же определяется положение трала относительно диаметральной плоскости судна, так как в результате течений, ветра в общем случае наблюдается отклонение трала от диаметральной плоскости судна в ту или другую сторону. Отклонение может быть значительным, и его необходимо учитывать при наведении трала на косяк.
Курсовой угол на трал целесообразно определять пеленгованием источника акустических колебаний, устанавливаемого посредине подборы трала. Следует рассмотреть и возможность использования в качестве источника звука для этих целей уже устанавливаемый на трале сетевой зонд. Получаемые данные об угловом положении центра плотности косяка и трала служат исходной информацией для расчета на ЭВМ и выдачи сигналов управления корректировкой судна в процессе сближения.
При приближении к косяку также одновременно обрабатываются ЭВМ и данные о глубине косяка и трала.
Получаемые управляющие воздействия служат для корректировки горизонта хода трала.
Рыболокатор горизонтального действия осуществляет слежение за косяком до момента регистрации его рыболокатором вертикального действия, с помощью которого дополнительно уточняется глубина нахождения косяка и регистрируется протяженность и форма записи эхо-сигналов от него в этой плоскости для последующего сравнения с эхограммой этого же косяка, полученной при записи его траловым зондом.
Выполняемые далее операции могут быть различными в зависимости от конкретных промысловых условий. Если облавливаются одиночные скопления, достаточно далеко одно от другого расположенные, то с помощью рыболокатора горизонтального действия может продолжаться сопровождение (в том числе и автоматическое) косяка в кормовых секторах судна. Рыболокаторы с устройствами защиты от помех позволяют проводить такое слежение, однако наведение трала на косяк таким способом с достаточной для практических целей точностью, особенно при большом отстоянии трала от судна, еще требует проведения дополнительных исследований.
Другой путь оптимизации наведения - это создание аппаратуры горизонтального обзора с трала для слежения за косяком после прохода над ним судна в зоне между тралом и судном. Указанный способ находится в стадии разработки [27, 28]. Его использование представляется целесообразным при последовательном облове нескольких косяков, так как в этом случае рыболокатор горизонтального действия должен не только обеспечивать слежение за одним косяком, но и вести поиск других скоплений впереди судна с оценкой глубины их нахождения. Данные о скорости судна и дистанции до косяка после обнаружения являются исходной информацией для автоматической системы при определении момента отдачи трала, скорости траления ваеров и т. д. Конечная информация о результатах траления выдается индикатором степени наполнения кутка рыбой, подводный блок которого устанавливается на кутке трала. Такие индикаторы уже прошли все стадии экспериментальной проверки и испытаний и в настоящее время успешно эксплуатируются на промысловых судах различных типов [25, 27].
Таким образом, средства современной промысловой гидроакустики уже обеспечивают получение большего количества информации, необходимой для оптимизации процессов разноглубинного прицельного лова, в том числе и для их автоматизации.
Дополнение информации, получаемой с помощью средств промысловой гидроакустики, данными аппаратуры радио- и электронавигации позволяет решать с помощью ЭВМ и ряд других задач по ведению эффективного лова рыбы (например, "запоминание" мест косяков рыбы после окончания траления, быстрое нахождение скопления после потери акустического контакта с ним и др.).
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'