Применение гидролокационной аппаратуры одновременного обзора
Электронно-сканирующие рыболокаторы одновременного панорамного обзора (особенно имеющие высокую разрешающую способность по углу и дистанции) обладают большими возможностями по сравнению с другими средствами подводного наблюдения в отношении скорости обзора и дальности действия. Так, много различных исследований проводится с рыболокатором ARL, разработанным в Англии. Он работает на частоте 300 кГц, имеет сектор одновременного обзора 30°, разрешающую способность по углу ≈ 0,33° и по дистанции примерно 7,5 см. С помощью этого рыболокатора были проведены работы по обнаружению косяков рыб и скоплений, определению их размеров и формы, наблюдению за их поведением, а также по изучению работы пелагических тралов, их оснастки, поведения косяков рыбы в районе трала, обнаружению и классификации подводных препятствий, затонувших судов, исследованию морского дна и т. д. [44, 71, 72, 93].
Изображение косяков на индикаторе с разверткой типа В аппаратуры ARL показано на рис. 84, а, б, в. На рис. 84, а показано изображение косяка эллиптической формы, а на рис. 84, б, в видны косяки длиной более 20 м компактной структуры.
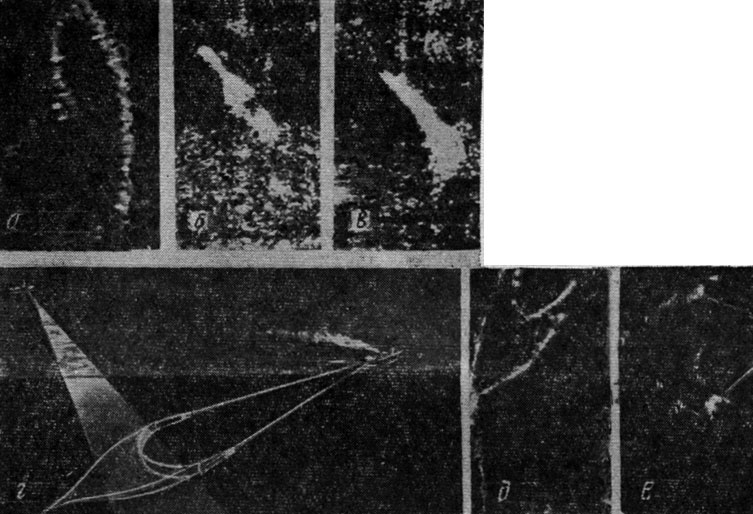
Рис. 84. Изображение эхо-сигналов от косяков рыбы и трала на экране электронно-сканирующего рыболокатора ARL: а, б, в - наблюдение формы косяков; г - процесс наблюдения за; тралом и рыбой с использованием ARL; д - изображение трала; е - то же, и рыбы в устье трала
Наблюдение за работой пелагического трала и поведением рыбы в зоне его действия проводилось по схеме, представленной на рис. 84, в. Судно "Гонсамер" двигалось за научно-исследовательским судном "Клионе", буксирующим трал, таким курсом и с такой скоростью, чтобы можно было проводить наблюдение за тралом с помощью сканирующего рыболокатора из нужной точки. С дистанции около 70 м с помощью аппаратуры ARL можно было оценить количество кухтылей верхней подборы трала и их распределение. Аппаратура также позволяла фиксировать изображения трала и рыбы в районе трала, впереди него, в различных частях трала (крыльях, сквере, кутке). На рис. 84, д дано изображение почти всего трала при озвучивании его примерно под углом 45°, на рис. 84, е - передней части трала и рыбы в устье трала после того, как довольно большой косяк оказался между подборами. Косяк рыбы разделился на две группы, которые двинулись вдоль правого и левого крыльев трала [90].
Электронно-сканирующий рыболокатор, разработанный в Англии, с рабочей частотой 500 кГц, разрешающей способностью по углу 0,5°, по дистанции 7,5 см и шириной сектора одновременного обзора 30° также широко использовался при изучении поведения рыб, в том числе при воздействии на рыбу внешних факторов. В связи с высокой рабочей частотой дальность действия указанного рыболокатора по обнаружению рыбы не превышала 200 м [90]. Акустическая система аппаратуры имела максимальный размер всего 17 см, и высокая разрешающая способность была получена благодаря использованию не только высокой рабочей частоты, но и применению мультипликативной обработки эхо-сигналов [24, 25].
Рыболокатор ARL был модернизирован. В нем применена гидравлическая система стабилизации акустической антенны для предотвращения влияния бортовой и килевой качек судна, а также рыскания судна с применением гировертикали в качестве датчика углов бортовой и килевой качки и гирокомпаса для выдачи углов рыскания. Кроме того, предусмотрены возможность быстрого переключения из режима обзора в горизонтальной плоскости в режим обзора в вертикальной плоскости (за 1,5-4 с), плавного поворота антенны в горизонтальной, наклона ее в вертикальной плоскости, а также два диапазона работы (0-183 и 0-366 м).
Во время исследований и наблюдения за работой трала осуществляется не только озвучивание его в горизонтальной плоскости или в наклонных положениях, но и зондирование (сканирование) в вертикальной плоскости для получения поперечных сечений трала и определения его формы в различных участках по длине.
Аппаратура позволяет получать хорошие изображения донного трала в процессе работы с ним. Хотя самые четкие изображения были получены на более мелких глубинах и на более крупномасштабном диапазоне, оказалось возможным различать трал и его основные детали на расстояниях от антенны до 320 м при тралениях на глубине порядка 90 м. На расстоянии 183-274 м весь трал (от распорных досок до кутка) можно было видеть в одном кадре. Посредством наведения акустической системы по углу места и горизонту можно было следить за ваерами от кильватерной струи буксирующего судна до распорных досок трала. С помощью аппаратуры определялось также расстояние от верхней подборы трала до дна [44, 71,72, 93].
На получаемых изображениях можно было весьма отчетливо видеть шлейфы, возникающие При движении траловых досок и оценивать их ширину, высоту, длину и плотность.
Аппаратура ARL использовалась также при оценке эффективности работы донных тралов [59]. В связи с тем, что при регистрации отдельных рыб, находящихся вблизи грунта, сказывается влияние донной реверберации, указанные эксперименты проводились при совместном использовании электронно-сканирующего рыболокатора ARL и гидроакустических меток-ответчиков, излучающих сигнал на частоте 300 кГц при попадании на них сигнала посылки ARL-аппаратуры. Метка-ответчик состоит из электро акустического преобразователя, электронного приемопередатчика, батарейного источника питания и размещается в полиэтиленовом цилиндре диаметром 1 см и длиной 5 см, наполненном маслом. При озвучивании импульсом ARL-станции метка-ответчик излучает сигнал-импульс длительностью 3 мс с частотой заполнения 300 кГц, который принимается рыболокатором и воспроизводится на экране индикатора. По положению отметки сигнала относительно момента посылки определяется направление на объект и дистанция до него. Масса метки в воде 3-4 г. Продолжительность работы 32 ч при частоте повторения 4 имп./с.
При проведении указанных исследований метку прикрепляли к камбале, которую затем выпускали в море. С помощью рыболокатора осуществлялось слежение за ней. Камбала обычно сразу опускалась к грунту и в течение 3-4 ч, как правило, не уходила в сторону от того места, куда опустилась, более чем на несколько сотен метров. Диапазон, на котором производилось слежение за ней, был равен 150-250 м. Через несколько часов после того, как камбалу выпустили в море (она успевала адаптироваться), другое научно-исследовательское судно вело лов тралом в том месте, где находилась рыба с меткой. Траление проводилось по точным данным о нахождении рыбы, получаемым с помощью сканирующего рыболокатора.
За ходом траления следили с помощью рыболокатора с судна "Клионе" от того момента, когда исследовательское судно "Корелла" проходило над рыбой или около нее, до подхода трала к косяку. Расположение рыбы по отношению к тралу изображалось на экране индикатора, проводились также съемки на пленку и запись данных и изображений с экрана на видеомагнитофон для последующего анализа. Как указывается в литературе [59], было сделано большое количество донных тралений, что позволило получить ценные данные для непосредственной оценки эффективности работы донного трала. Указанный метод может также найти применение при изучении поведения, миграций рыб и т. д.
Рыболокатор ARL благодаря наличию высокой разрешающей способности как по углу, так и по дистанции обеспечивает возможность исследования структуры косяков и скоплений рыб в диапазоне дальностей 180-360 м для оценки плотности концентрации рыб.
Большие возможности рыболокатора ARL были выявлены при проведении работ по обнаружению и оценке препятствий на дне (определению их размеров, протяженности, высоты с достаточно большой точностью).
Рыболокатор ARL использовался также в режиме секторного сканирования в вертикальной плоскости поперек направления движения судна для получения данных о рыбе, находящейся у дна, при этом во время каждого зондирования сразу просматривалась достаточно широкая полоса под килем судна.
Таким образом, результаты использования рыболокатора ARL свидетельствуют о больших возможностях подобной аппаратуры при решении самых разнообразных задач во время рыбохозяйственных исследований. Дальность обнаружения рыбы и других объектов может быть повышена при уменьшении рабочей частоты аппаратуры за счет снижения разрешающей способности.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'