Применение гидролокационной аппаратуры с непрерывным излучением и частотной модуляцией
При проведении рыбохозяйственных исследований используются и рыболокаторы с непрерывным излучением акустической энергии и частотной модуляцией CTFM, обеспечивающие высокую скорость получения информации. С помощью рыболокатора СМ506 проведено большое количество экспериментальных работ в "Бюро коммерсиал Фишериз лаборатори" (Гонолулу). Указанный рыболокатор работает в двух полосах частот (диапазонах частот): в режиме поиска объектов используется в диапазоне частот от 52 до 32 кГц с диапазоном измерения до 1000 м, а в режиме "классификация" - в диапазоне частот от 290 до 260 кГц (для обеспечения высокой разрешающей способности на близких дистанциях). С данной аппаратурой в лаборатории изучалось поведение и распределение тунцов - очень быстро перемещающихся и часто практически одиночных объектов. Для длительного слежения за тунцами использовались также ультразвуковые метки, прикреплявшиеся к объекту [100].
При работе в диапазоне низких частот ширина характеристики направленности антенны в горизонтальной плоскости составляла 6°, в вертикальной - 15°, в диапазоне высоких частот предусмотрена возможность работы тремя характеристиками направленности антенны (по выбору): шириной 0,6°×0,6° по горизонтали и вертикали; шириной 0,6° в горизонтальной плоскости и 15° в вертикальной и шириной 0,6° в вертикальной плоскости и 15° в горизонтальной. Вся акустическая система может автоматически разворачиваться по горизонту и наклоняться по вертикали на угол до 90°. Хотя в аппаратуре предусмотрена очень высокая угловая разрешающая способность на близких дистанциях, реализовать ее полностью не удается, так как рыболокатор не имеет системы стабилизации по качке и рысканию судна.
Аппаратура подобного типа имеет следующие достоинства. Во-первых, скорость сканирования (разворота) антенны может быть очень высокой, до 30° в секунду, что соответствует скорости вращения антенны радиолокатора. Разрешающая способность по дистанции зависит от количества используемых частотных фильтров и расстояния до объекта (диапазона). При слежении за объектами, особенно быстродвижущимися, с помощью станции CTFM обеспечивается большой поток информации об их перемещениях благодаря очень быстрому сканированию. Положительным качеством этой аппаратуры с непрерывной передачей и приемом акустической энергии является также возможность быстрого получения данных о силе цели объекта, так как информация поступает непрерывно при установке акустической системы в направлении объекта, воспроизводится на экране осциллоскопа с памятью и усредняется.
Вариант аппаратуры CTFM фирмы "Страза Электронике Сан Диего" (США) применялся при проведении экспериментальных и исследовательских работ в области классификации рыбных скоплений посредством регистрации допплеровского изменения (сдвига) частоты принимаемой отраженной акустической энергии, возникающего при движении объектов в скоплении и косяков относительно акустической антенны системы. Разрешающая способность аппаратуры при использовании частотного анализатора "Дэлтик" составляла 1,67 Гц ± 300 Гц. Станции CTFM наиболее удобны для исследования допплеровских изменений частоты, так как получение информации о дистанции до обнаруженного объекта в них обеспечивается путем измерения разностной частоты излучаемых и принимаемых отраженных акустических колебаний. В них уже имеется ряд блоков, которые могут быть использованы для измерения допплеровских сдвигов, так как при этом также необходимо определять изменения частоты.
Во время проведения указанных исследований поиск и обнаружение косяков проводились при работе аппаратуры в режиме частотной модуляции (ЧМ). При подходе к косяку на расстояние около 100-200 м включался режим смодулированного излучения на частоте 70 кГц. Отраженные от рыбы колебания данной частоты и допплеровские изменения принимались гидрофоном (приемной антенной), затем поступали в смеситель и фильтр, в которых отсеивалась частота 70 кГц. Далее сигналы поступали на анализатор спектра, затем допплеровский спектр воспроизводился на ЭЛТ и записывался на магнитофонную ленту [60]. В первых работах с этим оборудованием цели подразделяли на три класса: стационарные, с узкополосным допплеровским смещением (направленное перемещение объекта) и с широкополосным допплеровским сдвигом (сложное движение относительно акустической системы). Было установлено, что в последнем случае объектами являются косяки рыбы и широкополосный допплеровский спектр в некоторой степени служит их характеристикой.
На рис. 85, а представлен допплеровский спектр от скопления рыбы, привлеченного приманкой и находящегося на расстоянии около 45 м; частота измеряется от центра экрана в ту и другую сторону, и, следовательно, можно сразу определить, движется объект к антенне или от нее. На рис. 85, б показаны допплеровские сигналы от рыбы, приближающейся к антенне; по величине отклонения частоты от центра экрана можно измерить скорость ее перемещения. В приведенном случае максимальный сдвиг частоты равен ±300 Гц и соответствует скорости 321 см/с, отсюда скорость рыбы равна 115 см/с.
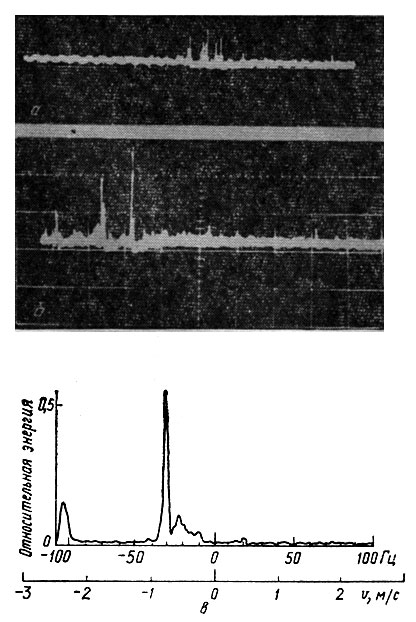
Рис. 85. Допплеровские сигналы от косяка (а) и от отдельной рыбы (б) и при импульсном излучении (в)
Для изучения и исследования допплеровских спектров отдельных рыб и скоплений может использоваться и импульсная рыболокационная техника при применении длинных посылок (например, свыше 100 мс). На рис. 85, в показан пример допплеровского спектра эхо-сигналов при излучении импульсов длительностью 500 мс на частоте 30 кГц. Подъем вблизи 90 Гц - это донная реверберация. Наибольший пик соответствует объемной реверберации. Правее его показан допплеровский сдвиг, соответствующий средней скорости косяка v=0,45 м/с, минимальная скорость равна примерно 0,1 м/с, тогда как максимальная превышает 0,58 м/с.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'