Применение высокочастотной и низкочастотной гидролокационной аппаратуры бокового обзора
Высокочастотная гидроакустическая аппаратура бокового обзора может использоваться при изучении характера дна, обнаружении и идентификации препятствий на дне и неровностей грунта, при оценке пригодности обследуемого района для донного тралового лова и т. д. На рис. 86 показан пример обнаружения и регистрации на ленте самописца препятствий на дне (затонувшего судна) с помощью аппаратуры бокового обзора. Подобный вид имеют эхограммы отражений от неровного дна (по величине мертвой зоны оценивается высота неровностей). В современных станциях бокового обзора с буксируемыми антеннами предусмотрена возможность дистанционного изменения угла наклона антенны. При этом меняется дальность действия и характер трасс отметок эхо-сигналов на ленте регистратора [89].
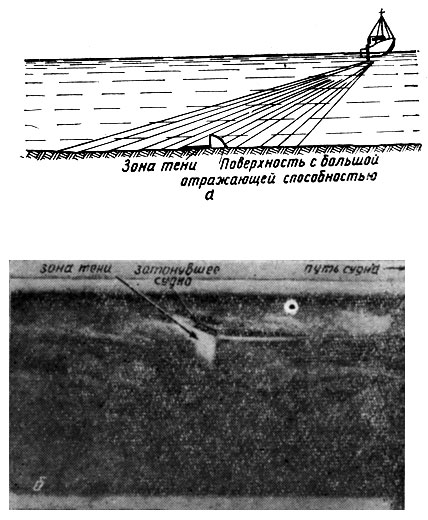
Рис. 86. Работа аппаратуры бокового обзора (а) и эхограмма (б)
Перспективным представляется применение для изучения формирования скоплений рыб, их миграций и других характеристик низкочастотной гидроакустической аппаратуры бокового обзора дальнего действия. Об этом свидетельствуют, например, работы в этом направлении, проведенные Английским национальным институтом океанографии с использованием гидролокатора "Глория", предназначенного для геологических исследований дна. Принципы работы гидроакустических систем бокового обзора рассмотрены в литературе [25].
В указанной аппаратуре используется пьезоэлектрическая антенна длиной 5 и высотой 1,25 м, состоящая из 144 преобразователей из цирконаттитаната свинца (ЦТС) и размещенная в буксируемом носителе торпедообразной формы из стеклопластика длиной 10 м. Носитель может буксироваться на глубине от 30 до 120 м при скорости судна до 7 уз. Применение буксируемой антенны с переменной глубиной погружения обеспечивает стабильность положения ее характеристики направленности в пространстве при движении судна во время волнения моря, позволяет получать большую акустическую мощность Ра (до 50 кВт) без появления кавитации, обеспечивает уменьшение уровня шумов и помех и достижение максимальных дальностей действия при различных гидрологических условиях. Масса носителя с антенной составляет 6,7 т в воздухе и 3,5 т в воде. Аппаратура может формировать и излучать тональные импульсы или импульсы с ЧМ с шириной спектра около 100 Гц и Ра имп до 50 кВт, средней несущей частоте 6,4 кГц и длительности до 2-4 с один раз в 18 или 30 с.
При излучении широкополосных импульсов с внутриимпульсной ЧМ обработка принимаемых эхо-сигналов проводится коррелятором "Дэлтик" ("Делай Лайн Тайм Коррелятор") с использованием запомненной в нем копии импульса посылки. Коррелятор "Дэлтик" с устройством временного сжатия сигналов имеет лишь один канал. При приеме эхо-сигнал от цели отображается выборочными значениями, взятыми с частотой 2fв через интервалы

(fв - верхняя частота спектра). Полный сигнал, таким образом, разлагается на
выборок (Т - длительность сигнала). Выборки затем подвергаются сжатию во времени и накапливаются в линии задержки. До прихода эхо-сигнала выходная функция коррелятора равна 0. Она достигает максимального значения, когда отраженный сигнал полностью переходит в линию задержки, и по окончании эхо-сигнала убывает.
Как указывается в литературе [73], использование коррелятора позволило улучшить соотношение сигнал/шум, т. е. оно стало примерно на 400 (26 дБ) больше, чем при излучении коротких немодулированных импульсов (с т порядка 10 мс) одинаковой мощности с сохранением равной разрешающей способности ( ≈ 7,5 м). Таким образом, при излучаемой мощности 9-10 кВт аппаратура с внутриимпульсной ЧМ будет эквивалентна станции обычного типа с пиковой мощностью свыше 1 мгВт (при τ=10 мс).
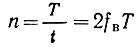
В системах с корреляционной обработкой принимаемых эхо-сигналов улучшение соотношения сигнал/шум на выходных устройствах аппаратуры обеспечивается излучением импульсов большой длительности, т. е. с большой энергией при обычных уровнях мощности, с сохранением разрешающей способности, соответствующей получаемой при использовании коротких импульсов. На рис. 87 показаны виды излучаемых, принимаемых и обработанных сигналов обычной эхолокационной аппаратуры (с короткими импульсами посылки) и с корреляционной обработкой при внутриимпульсной ЧМ. В первом случае принятые эхо-сигналы обычно детектируются (см. рис. 87, в), в результате получаемый видеосигнал по длительности примерно равен поступившему сигналу с высокочастотным заполнением. Соотношение сигнал/шум при этом не улучшается, а при слабых сигналах даже значительно ухудшается за счет детектирования.
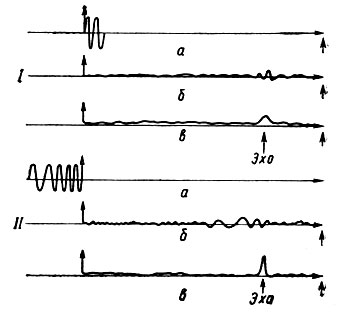
Рис. 87. Излучаемые (а), принимаемые (б) и обработанные (в) колебания и сигналы в обычной эхолокационной аппаратуре (I) и с корреляционной обработкой (II)
В системах с корреляционной обработкой излучаются значительно более продолжительные импульсы примерно с той же самой шириной спектра частот. Коррелятор сравнивает принимаемые колебания с копией излученного импульса (с частотой до нескольких тысяч раз в секунду) и вырабатывает выходной сигнал при согласовании двух указанных колебаний посредством их перемножения и усреднения результирующего колебания по длительности копии импульса посылки. Усреднение позволяет уменьшить относительный уровень шума на выходе коррелятора.
На рис. 88 показан график изменения выходного сигнала с коррелятора в зависимости от входного соотношения сигнал/шум [73]. Уровень выходного сигнала относится к величине шума коррелятора в отсутствие выходного сигнала. Из графика видно, что для сигналов, уровень которых меньше уровня окружающих помех, имеется на выходе системы улучшение до 18-20 дБ. Это подтверждает эффективность использования "длинных" импульсов с большой излучаемой энергией. На рис. 88 показано уменьшение уровня звукового давления мгновенного шума для больших соотношений сигнал/шум.

Рис. 88. Зависимость сигнала на выходе коррелятора от соотношения сигнал/шум на его входе: 1 - сигнал; 2 - помеха
В некоторых случаях применения эхолокационной аппаратуры помехи на ее входе характеризуются наличием конечного числа очень интенсивных импульсов, создаваемых различными источниками. Корреляционная обработка в системах с внутриимпульсной ЧМ является эффективным средством защиты от таких помех (во-первых, предусматриваемое в корреляторах ограничение уменьшает амплитуду шумовых импульсов, и, во-вторых, импульсы помех, которые короче импульсов посылок, вносят пропорционально меньшие вклады в выходной сигнал вследствие усреднения при корреляционной обработке).
На рис. 89 показано влияние изменения уровня шума на выходные сигналы обычной эхолокационной системы и системы с корреляционной обработкой ЧМ-колебаний. Во время первого цикла уровень шума составляет третью часть амплитуды эхо-сигнала и значительно увеличивается в течение второго цикла из-за появления в этот период нескольких весьма интенсивных импульсных помех, например при включении какой-либо установки на судне (см. рис. 89, а). Если в первом цикле эхо-сигнал может быть четко выделен, то во втором он практически неразличим среди помех. На рис. 89, б показаны необработанные колебания в приемном тракте аппаратуры с внутриимпульсной ЧМ, которые отличаются большей длительностью излучаемого импульса и, следовательно, эхо-сигнала. Выходной сигнал коррелятора показан на рис. 89, в (изменение уровня шума почти не повлияло на эффективность выделения полезного эхо-сигнала).
Рис. 89. Воздействие импульсных помех на работу эхолокационной аппаратуры обычного типа - а и с корреляционной обработкой - б на входе коррелятора до обработки; в - то же, на выходе коррелятора
Излучение в станции "Глория" проводится под прямым углом к направлению движения носителя антенны, которая может быть установлена в носителе с излучением вправо или влево. Характеристика направленности антенны является узкой в горизонтальной плоскости (около 2°) и более широкой в вертикальной (10-15°) (рис. 90). При исследованиях характеристик и рельефа дна ось характеристики устанавливается с некоторым смещением вниз от горизонтали для озвучивания большей площади дна. На рис. 90 также показаны три боковых лепестка антенны.
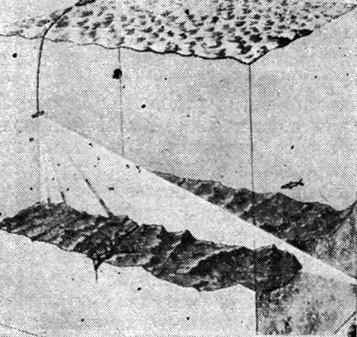
Рис. 90. Процесс просмотра пространства аппаратурой бокового обзора
Предусмотрено два режима отображения принимаемой информации. При работе в первом режиме на ленте самописца темные отметки соответствуют большим величинам эхо-сигналов, например от береговой черты или скал, тогда как более светлые отметки указывают на наличие слабоотражающих участков, объектов или зон акустической "тени" [25]. Чаще аппаратура работает во втором режиме, в том числе и при поиске рыбных скоплений, при этом применяется метод теневой индикации (отраженные сигналы, принимаемые с достаточно узкого слоя водной среды и дна от достаточно сильных рассеивателей, воспроизводятся на ленте регистратора в виде светлых отметок, а зоны тени или участки мелкозернистых донных осадков, рассеивающие в обратном направлении небольшое количество акустической энергии - в виде темных отметок и при последовательном накоплении в виде темных пятен).
Работы с аппаратурой "Глория" по обнаружению рыбы проводились в 1971 и 1973 гг. в мелководных шельфовых районах (у Гебридских островов) с глубинами до 150 м, поэтому ось характеристики направленности устанавливалась практически под углом 0°, уже начиная с небольшого расстояния от антенны ( ≈ 50 м) весь слой воды в данном случае полностью озвучивался, а носитель буксировался на небольших глубинах (до 33 м). В связи с этим используемая акустическая мощность не превышала 10 кВт (для исключения кавитации). В основном использовалась Ра=5 кВт.
Выбранный для испытаний участок был предварительно обследован с помощью аппаратуры бокового обзора малого радиуса действия с f=36 кГц и рыболокатора вертикального действия с f=10 кГц. По полученным данным было установлено, что в указанном районе скалы практически отсутствуют, грунт илистый или песчаный (слаборассеивающий), глубины в среднем равны 150 м. У одного края выбранного района находилась банка глубиной около 50 м. С помощью рыболокатора вертикального действия и указанной станции бокового обзора при вертикальной локации была проведена предварительная оценка распределения, плотности ж глубин расположения пелагических рыбных скоплений в данном районе.
В процессе первых работ с аппаратурой "Глория" в летний период 1971 г. было установлено, что условия распространения звука в выбранном районе были неблагоприятными из-за отрицательной рефракции, поэтому цели не обнаруживались на дистанции, превышающей 4-5 км. Анализ данных профиля скорости звука показал, что при движении носителя на глубине 33 м антенна располагалась в верхней части сильного температурного скачка, что приводило к быстрому, искривлению акустических лучей в направлении дна.
Указанный профиль с и соответствующая лучевая диаграмма показаны на рис. 91, а. Лучи на диаграмме рассчитаны и нанесены через интервалы 1°, по 5° вверх и вниз от центрального луча, выходящего под углом 0°. Приведенное на рис. 91, а изменение скорости звука в диапазоне глубин от 20 до 130 м соответствовало изменению температуры от 13,4 до 10,7° С при постоянной солености S=35‰.
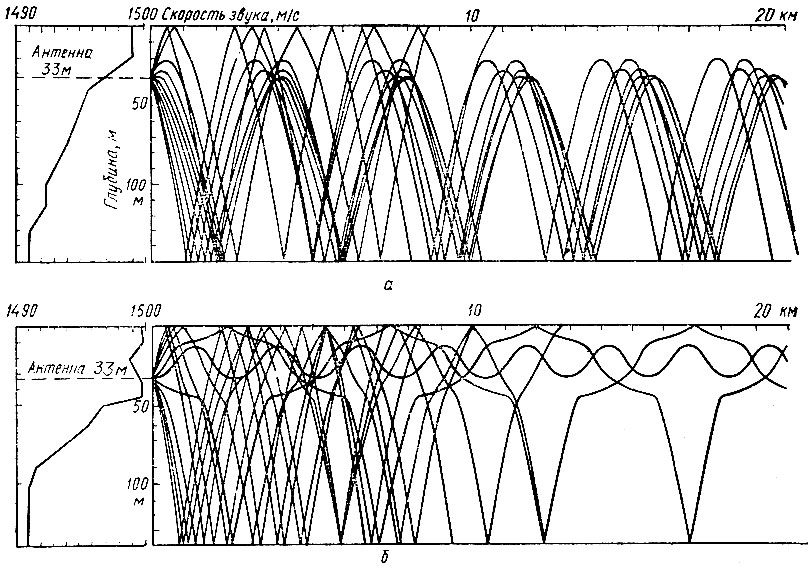
Рис. 91. Характер распространения звука в начале (а) и в конце (б) экспериментальных работ с аппаратурой
Через несколько дней после интенсивного перемешивания поверхностных слоев воды под действием сильного ветра условия распространения акустических колебаний значительно улучшились и дальность обнаружения целей аппаратурой существенно увеличилась. В результате было зафиксировано большое количество скоплений рыбы между судном и краем банки Хеймс, а скальные образования на этой банке обнаруживались на дистанциях до 13 км. В конце экспериментальных работ была выполнена серия галсов, параллельных границе банки Хеймс на расстоянии 18 км от нее для определения максимальной дальности обнаружения скоплений рыбы при данных гидрологических условиях. Рыбные концентрации обнаруживались на дистанциях до 15 км при излучаемой мощности 9 кВт.
При этом вновь были оценены условия распространения звука. Профиль скорости звука и соответствующая лучевая диаграмма показаны на рис. 91, б, на котором видно, что антенна станции в данном случае находится в пределах изотермического слоя (у его нижней границы). Обнаружение рыбы на глубинах, больших 33 м, означало, что имело место проникновение части энергии через границу температурного скачка в более глубокие слои воды.
При указанных условиях за время эксперимента было выполнено более 40 одинаковых галсов длиной порядка 13 км. Это позволило каждые 1,25 ч получать своеобразные "планшеты" подводной обстановки с участков площадью 17×13 км2 и 13×13 км2.
На эхограммах, полученных с помощью станции "Глория", можно было видеть большое количество отметок от целей над ровными грунтами у банки Хеймс (малых и рассеянных, протяженных и достаточно плотных). В светлое время суток на ленте самописца регистрировались эхо-сигналы от скоплений рыбы протяженностью до 5-7 км. Для облегчения анализа и расшифровки показаний рыбных скоплений и их перемещений на получаемых эхограммах в качестве опорных использовались отметки эхо-сигналов от трех скальных образований (имевших характерные очертания), которые отмечены на рис. 92, а буквами А, В и С. На рис. 92, б показан тот же участок, полученный при движении судна параллельным курсом на большем расстоянии (на 5 км) от границы банки Хеймс. Для облегчения интерпретации показаний отметки эхо-сигналов от края банки на эхограмме выделены белой линией. На эхограмме, показанной на рис. 92, б, также отмечены три опорные цели А, В и С. Кроме того, видны отметки эхо-сигналов от скопления рыбы длиной 7 км, расположенного под углом к границе банки и находящегося над илистым грунтом с глубинами около 110 м. Широкая стрелка на эхограммах (см. рис. 92 б, 96, 97) показывает направление озвучивания, а узкая (рис. 92, б) - область сильного обратного рассеяния, возникающего при отклонении акустических лучей характеристики вниз (-2÷-5°) из-за отрицательной рефракции.
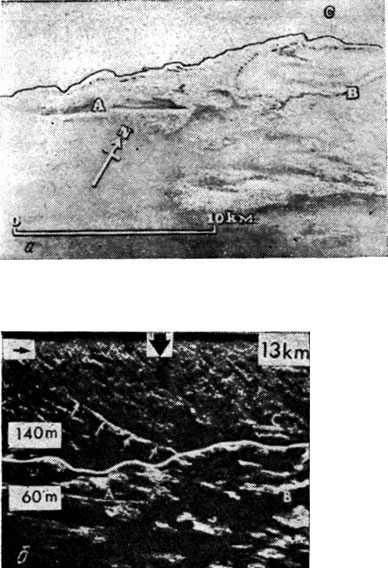
Рис. 92. Эхограммы панорамной записи данных станцией бокового обзора при отсутствии рыбных скоплений (а), при наличии косяков (б)
На основании информации, полученной за время выполнения съемки, эхограмма которой представлена на рис. 92, б, и данных двух последующих одинаковых галсов, выполненных с интервалом 80 мин, был построен своеобразный планшет, отражающий характер перемещения наблюдаемой рыбной концентрации (рис. 93, а). На нем можно видеть постепенное разделение крупного скопления на отдельные косяки и стаи в процессе его перемещения вдоль края банки
Хеймс со скоростью, близкой скорости поверхностного течения. Край банки и опорные скальные образования А, В и С показаны на рис. 93, а темным цветом [68, 76-80].
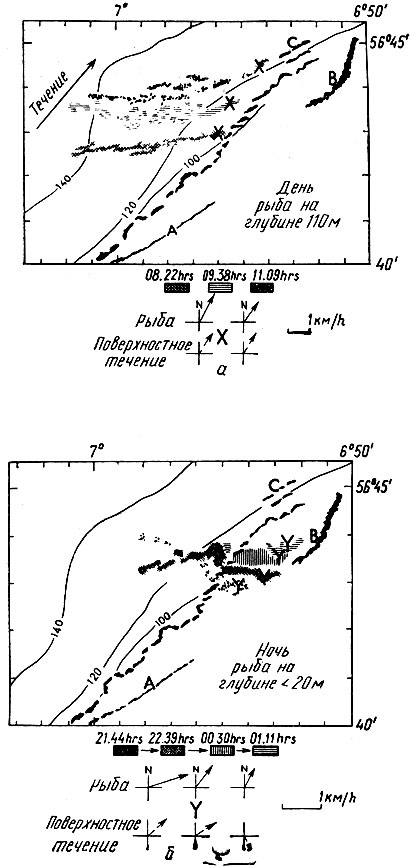
Рис. 93. Примеры планшетов эхометрической съемки
Другой пример последовательных наблюдений за скоплениями рыб, проведенных уже не в светлое, а в темное время суток, представлен на рис. 94. Во время первых галсов (начиная с 17 ч 55 мин) отметки эхо-сигналов от рыбы на эхограммах не зафиксированы, далее (в 20 ч 00 мин) начали появляться рассеянные отметки эхо-сигналов от рыбы над банкой Хеймс. Затем (в 21 ч 40 мин) рыба стала формироваться в небольшие скопления, эхо-сигналы от которых показаны стрелками на первой эхограмме (см. рис. 94, а). В течение следующего галса (с 22 ч 40 мин) они стали объединяться в более плотные скопления длиной до 2 км (см. рис. 94, б). Во время дальнейших наблюдений (в 00 ч 25 мин и 01 ч 15 мин) были зафиксированы еще более плотные концентрации рыб (см. рис. 94, в) и их передвижение вдоль края банки. Планшет съемки показан на рис. 93, б.
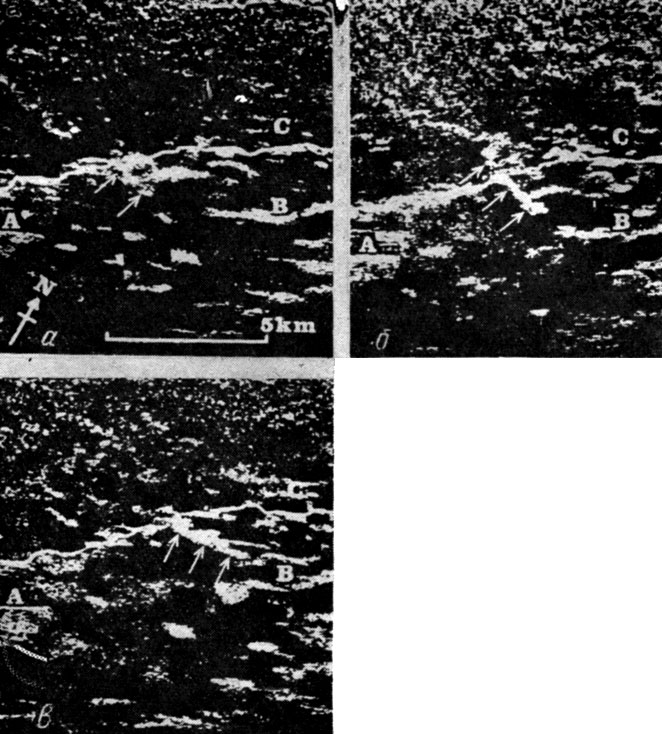
Рис. 94. Эхограммы последовательных наблюдений за формированием скоплений сельди в ночное время
В последующие дни благодаря дальнейшему улучшению обнаруживаемости выбранных опорных целей А, В и С судно стало выполнять галсы уже на расстоянии 10 км от линии 100-метровой изобаты вдоль банки Хеймс для охвата наблюдением большего пространства. Благодаря этому увеличилось количество фиксируемых скоплений рыбы и улучшились возможности наблюдения за их перемещением (в основном за движением скоплений, мало изменяющих свою форму в течение длительного промежутка времени, например нескольких часов, рис. 95).

Рис. 95. Эхограммы наблюдений за перемещением трех скоплений сельди (отмеченных значками ▼, ■, Δ)
На рис. 96 показана эхограмма, полученная в том же районе, но в другой период времени (в ноябре 1973 г.). На ней видны те же три опорные цели, однако вследствие более благоприятных "зимних" условий распространения звука (близких к прямолинейным) наблюдается меньшее число отражений от дна, чем на эхограмме, показанной на рис. 92, б. На рис. 96 можно видеть более протяженное скопление рыбы, чем в предыдущем случае.

Рис. 96. Эхограмма панорамной съемки участка, изображенного на рис, 92, в другой период времени
На рис. 97, а, б и в представлены эхограммы, характеризующие перемещения рыбы относительно опорных донных целей в другом месте района Гебридских островов. Указанные эксперименты были проведены в ноябре 1973 г. при изотермических характеристиках водной среды. Эхограммы получены при лоцировании примерно одного и того же участка через одинаковые промежутки времени в период от 4 до 8 ч. Двумя темными стрелками отмечена подводная граница островов. На эхограммах также виден ряд эхо-сигналов от скальных образований на больших глубинах. На рис. 97, б и в просматривается большой косяк сельди, отмеченный небольшими светлыми стрелками, движущийся от границ острова в более глубокие воды, где он затем рассеялся. Примерные глубины участков в метрах приведены на рис. 97, а.
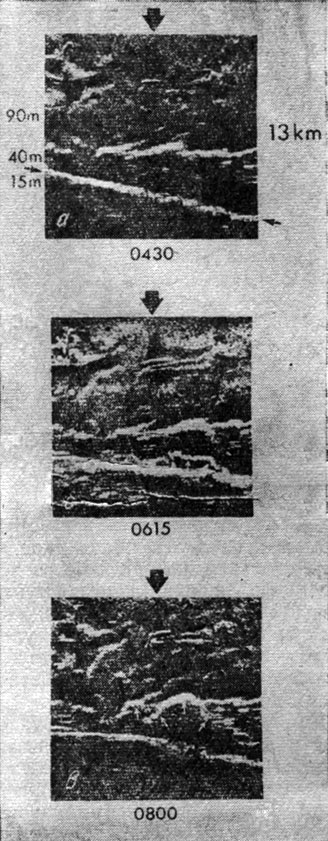
Рис. 97. Эхограммы, иллюстрирующие характер перемещения скоплений рыбы, при регистрации их с помощью аппаратуры бокового обзора
В 1971 г. в ходе экспериментов также проверялась возможность наведения на рыбные скопления по данным аппаратуры "Глория" сейнера "Лунар Боу", осуществлявшего облов кошельковым неводом косяков, обнаруженных станцией "Глория", для их идентификации, оценки количества рыбы и т. д. После обнаружения скопления на большой дистанции определялось его положение относительно промыслового судна, место нахождения которого оценивалось с помощью радиолокационной станции. Далее судну сообщали курс следования для сближения со скоплением, который затем корректировали, и расстояние до скопления. Когда сейнер подходил к косяку на дистанцию около 1 км, устанавливался контакт рыболокатора ближнего действия, размещенного на сейнере с косяком и проводился облов скопления. Используя информацию от аппаратуры "Глория", сейнер "Лунар Боу" тратил меньше времени на поиск рыбы и имел больший улов по сравнению с тринадцатью другими однотипными судами, работавшими в этом же районе.
Видовая принадлежность обнаруживаемых при экспериментальных работах скоплений определялась контрольными уловами сейнера "Лунар Боу", а также была проверена сравнением акустической силы цели сельди с отражательной способностью других биологических объектов, имевшихся в данном районе (скумбрии, сифонофор и мальков рыб), с помощью графиков, приведенных на рис. 98. На рис. 98 представлено изменение силы цели сельди длиной 28 см, сифонофор (или мальков рыб длиной порядка 1 см), рассчитанных для глубины 50 м и скумбрии длиной 35 см. Сельдь, некоторые сифонофоры и мальки рыб имеют плавательные пузыри, а скумбрия является беспузырной рыбой. В области выше резонанса (в районе рабочей частоты станции "Глория") на графике для сельди значения ее силы цели: имеют примерно десятикратный разброс, обусловленный рядом причин, в том числе и изменением положения рыбы относительно направления озвучивания. С учетом указанной неопределенности минимальная разница в силе цели сельди и скумбрии на частоте 6,4 кГц составляет 10 дБ, а сила цели сифонофор и: мальков рыб на этой частоте отличаются от силы цели сельди на много порядков.
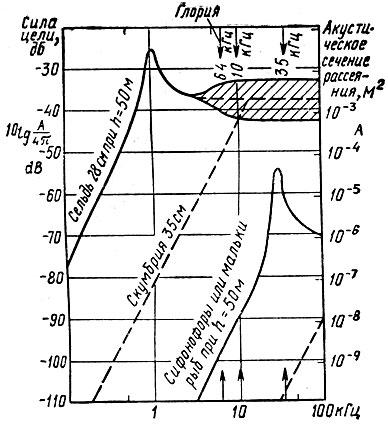
Рис. 98. Изменение силы цели рыбы с частотой
Для перехода к определению силы цели скоплений сельди была предварительно оценена их плотность на основании данных, полученных от "Лунар Боу" во время облова рыбы при наведении его по показаниям станции "Глория". Перед обловом объем косяка был оценен примерно в 200 000 м3 с количеством рыб порядка 80 000 шт. (исходя из массы выловленной рыбы), что соответствует среднему расстоянию между рыбами в скоплении d=1,2 м (т. е. d=5λ на частоте 6,4 кГц). Из этого был сделан: вывод о некогерентном вкладе отражений отдельных рыб в общий эхо-сигнал от скопления. Тогда с учетом акустического поперечного сечения отдельной сельди А, равного примерно 2,5×10-3 м2 (рис. 98), и объема, захватываемого характеристикой аппаратуры при направлении ее на косяк, сила цели era была определена в +5 дБ.
Таким образом, если бы зарегистрированные на указанных эхограммах показания являлись эхо-сигналами от скумбрии, это означало бы, что она находится в очень крупных и плотных скоплениях (чтобы иметь силу цели +5 дБ). Однако ни одно из промысловых судов не наблюдало больших концентраций скумбрии во время проведения экспериментальных работ в указанном районе. Небольшие рыбы длиной 3-6 см с плавательным пузырем могли бы иметь подобную отражательную способность в скоплении при наличии их в таких же концентрациях, как и сельдь, но таких скоплений молоди также не наблюдалось в это время. Не было и значительных скоплений сифонофор и мальков рыб. Таким образом, проведенный анализ акустических характеристик обнаруживаемых скоплений подтвердил, что основным объектом локации при проведении экспериментов с аппаратурой "Глория" являлась сельдь [80].
В результате проведенных работ была установлена возможность успешного применения гидроакустической аппаратуры бокового обзора с большой дальностью действия для рыбного промысла, особенно в сложных гидрологических условиях, а также при изучении поведения рыбы, ее распределения, миграций и т. д. На основании данных, полученных при разработке, испытаниях и эксплуатации аппаратуры "Глория", английские специалисты пришли к выводу о возможности создания на базе современной электроники, гидроакустики и средств обработки информации аппаратуры бокового обзора с буксируемой антенной менее сложной конструкции, меньших габаритных размеров и массы, но с аналогичными тактико-техническими характеристиками, которая могла бы эксплуатироваться и на небольших судах с несложными и негромоздкими устройствами спуска-подъема буксируемого носителя.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://udimribu.ru/ 'Рыбалка'